Why comparing distance of one point in the world and the depth of one pixel in the image will not gives the reliable result #10
Comments
|
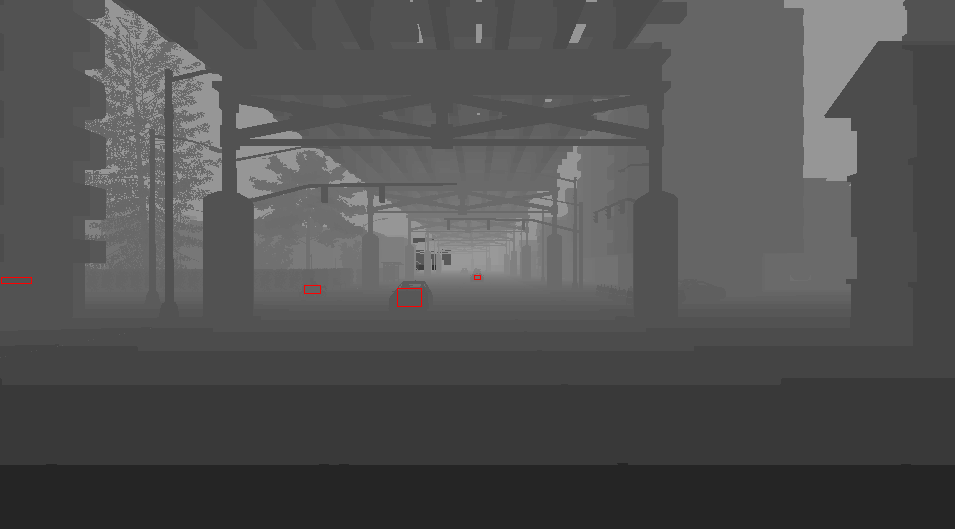
Hello @hailuu684 , I am really sorry for the very late response. There was no special reason for that. I just found out that if we just use a single point (bbox midpoint) the results will be very noisy. In particular I found at the time that the cars' windows were not taken into account in the measurement of the depth map. As you can see below, the window areas are not measured as the same pattern of the car body. So it is very possible that the bbox midpoint is not representative enough to be used as the comparison. To solve that, I decided to aggregate the depth of the pixels surrounding the midpoint. This way, we can use a thresholding mechanism so that the noise from the windows can be taken into consideration. I hope my answer is clear enough Best regards, |
{kind=link}
Hello Adib,
This is not an issue, I just wanted to ask you about the occlusion filter but I cannot find your email to ask. I am sorry for that.
I would like to ask how bad it is when we only compare the actual distance to one pixel in the image, and how comparing the actual distance with all pixels within the bounding box would help to solve the problem?
Thank you so much and hope to hear from you soon.
Best regards,
Luu Tung Hai
The text was updated successfully, but these errors were encountered: