在 Android 上实现实时的目标检测功能,此 Demo 有很好的的易用性和开放性,如在 Demo 中跑自己训练好的模型等。 本文主要介绍目标检测 Demo 运行方法和如何在更新模型/输入/输出处理下,保证目标检测 demo 仍可继续运行。
- 在本地环境安装好 Android Studio 工具,详细安装方法请见Android Stuido 官网。
- 准备一部 Android 手机,并开启 USB 调试模式。开启方法:
手机设置 -> 查找开发者选项 -> 打开开发者选项和 USB 调试模式
注意:如果您的 Android Studio 尚未配置 NDK ,请根据 Android Studio 用户指南中的安装及配置 NDK 和 CMake 内容,预先配置好 NDK 。您可以选择最新的 NDK 版本,或者使用 Paddle Lite 预测库版本一样的 NDK
- 目标检测 Demo 位于
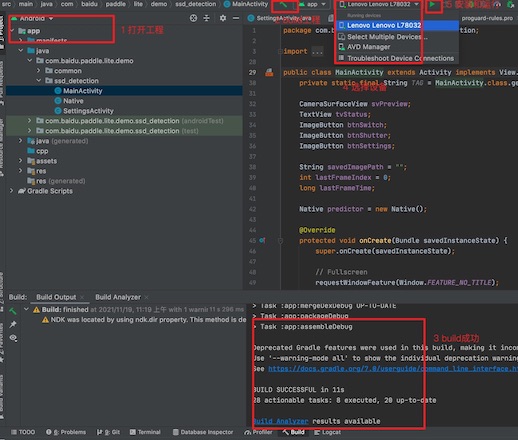
Paddle-Lite-Demo/object_detection/android/app/cxx/yolov5n_detection_demo目录 - 用 Android Studio 打开 yolov5n_detection_demo 工程
- 手机连接电脑,打开 USB 调试和文件传输模式,并在 Android Studio 上连接自己的手机设备(手机需要开启允许从 USB 安装软件权限)
注意:
如果您在导入项目、编译或者运行过程中遇到 NDK 配置错误的提示,请打开
File > Project Structure > SDK Location,修改Andriod NDK location为您本机配置的 NDK 所在路径。 如果您是通过 Andriod Studio 的 SDK Tools 下载的 NDK (见本章节"环境准备"),可以直接点击下拉框选择默认路径。 还有一种 NDK 配置方法,你可以在yolov5n_detection_demo/local.properties文件中手动完成 NDK 路径配置,如下图所示 如果以上步骤仍旧无法解决 NDK 配置错误,请尝试根据 Andriod Studio 官方文档中的更新 Android Gradle 插件章节,尝试更新Android Gradle plugin版本。
- 点击 Run 按钮,自动编译 APP 并安装到手机。(该过程会自动下载 Paddle Lite 预测库和模型,需要联网) 成功后效果如下,图一:APP 安装到手机 图二: APP 打开后的效果,会自动识别图片中的物体并标记
| APP 图标 | APP 效果 |
|---|---|
 |
 |
本项目基于Paddle-Lite的分支release/v2.11进行开发。
- Paddle Lite 项目:https://github.com/PaddlePaddle/Paddle-Lite
- 参考 Paddle Lite 源码编译文档,编译 Android 预测库
- 编译最终产物位于
build.lite.xxx.xxx.xxx下的inference_lite_lib.xxx.xxx- 替换 java 库
- jar 包
将生成的
build.lite.android.xxx.gcc/inference_lite_lib.android.xxx/java/jar/PaddlePredictor.jar替换 Demo 中的Paddle-Lite-Demo/object_detection/andrdoid/app/cxx/yolov5n_detection_demo/app/PaddleLite/java/PaddlePredictor.jar - Java so
- armeabi-v7a
将生成的
build.lite.android.armv7.gcc/inference_lite_lib.android.armv7/java/so/libpaddle_lite_jni.so库替换 Demo 中的Paddle-Lite-Demo/object_detection/andrdoid/app/cxx/yolov5n_detection_demo/app/PaddleLite/java/libs/armeabi-v7a/libpaddle_lite_jni.so - arm64-v8a
将生成的
build.lite.android.armv8.gcc/inference_lite_lib.android.armv8/java/so/libpaddle_lite_jni.so库替换 Demo 中的Paddle-Lite-Demo/object_detection/andrdoid/app/cxx/yolov5n_detection_demo/app/PaddleLite/java/libs/arm64-v8a/libpaddle_lite_jni.so
- armeabi-v7a
将生成的
- jar 包
将生成的
- 替换 c++ 库
- 头文件
将生成的
build.lite.android.xxx.gcc/inference_lite_lib.android.xxx/cxx/include文件夹替换 Demo 中的Paddle-Lite-Demo/object_detection/andrdoid/app/cxx/yolov5n_detection_demo/app/PaddleLite/cxx/include - armeabi-v7a
将生成的
build.lite.android.armv7.gcc/inference_lite_lib.android.armv7/cxx/libs/libpaddle_lite_api_shared.so库替换 Demo 中的Paddle-Lite-Demo/object_detection/andrdoid/app/cxx/yolov5n_detection_demo/app/PaddleLite/cxx/libs/armeabi-v7a/libpaddle_lite_api_shared.so - arm64-v8a
将生成的
build.lite.android.armv8.gcc/inference_lite_lib.android.armv8/cxx/libs/libpaddle_lite_api_shared.so库替换 Demo 中的Paddle-Lite-Demo/object_detection/andrdoid/app/cxx/yolov5n_detection_demo/app/PaddleLite/cxx/libs/arm64-v8a/libpaddle_lite_api_shared.so
- 头文件
将生成的
- 替换 java 库
先整体介绍下目标检测 Demo 的代码结构,然后再从 Java 和 C++ 两部分简要的介绍 Demo 每部分功能.

Native.java: Java 预测代码
# 位置:
yolov5n_detection_demo/app/src/main/java/com/baidu/paddle/lite/demo/object_detection/Native.javaNative.cc: Jni 预测代码用于 Java 与 C++ 语言传递信息
# 位置:
yolov5n_detection_demo/app/src/main/cpp/Native.ccPipeline.cc: C++ 预测代码
# 位置:
yolov5n_detection_demo/app/src/main/cpp/Pipeline.ccmodel.nb: 模型文件 (opt 工具转化后 Paddle Lite 模型),coco_label_list.txt:训练模型时的labels文件
# 位置:
yolov5n_detection_demo/app/src/main/assets/models/yolov5n_coco_for_gpu/model.nb
yolov5n_detection_demo/app/src/main/assets/models/yolov5n_coco_for_cpu/model.nb
yolov5n_detection_demo/app/src/main/assets/labels/coco_label_list.txtlibpaddle_lite_api_shared.so:Paddle Lite C++ 预测库
# 位置
yolov5n_detection_demo/app/PaddleLite/cxx/libs/arm64-v8a/libpaddle_lite_api_shared.so
# 如果要替换动态库 so,则将新的动态库 so 更新到此目录下build.gradle: 定义编译过程的 gradle 脚本。(不用改动,定义了自动下载 Paddle Lite 预测和模型的过程)
# 位置
yolov5n_detection_demo/app/build.gradle
# 如果需要手动更新模型和预测库,则可将 gradle 脚本中的 `download*` 接口注释即可CMakeLists.txt: C++ 预测库代码的编译脚本,用于生成 jni 的动态库lib_Native.so
# 位置
yolov5n_detection_demo/app/cpp/CMakeLists.txt
# 如果有cmake 编译选项更新,可以在 CMakeLists.txt 进行修改即可-
模型存放,将下载好的模型解压存放在
app/src/assets/models目录下 -
common Java 包 在
app/src/java/com/baidu/paddle/lite/demo/common目录下,实现摄像头和框架的公共处理,一般不用修改。其中,Utils.java 用于存放一些公用的且与 Java 基类无关的功能,例如模型拷贝、字符串类型转换等 -
object_detection Java 包 在
app/src/java/com/baidu/paddle/lite/demo/object_detection目录下,实现 APP 界面消息事件和 Java/C++ 端代码互传的桥梁功能 -
MainActivity 实现 APP 的创建、运行、释放功能 重点关注
checkAndUpdateSettings和onTextureChanged函数,实现 APP 界面值向 C++ 端值互传及预测处理流程public void checkAndUpdateSettings() { if (SettingsActivity.checkAndUpdateSettings(this)) { String realModelDir = getCacheDir() + "/" + SettingsActivity.modelDir; Utils.copyDirectoryFromAssets(this, SettingsActivity.modelDir, realModelDir); String realLabelPath = getCacheDir() + "/" + SettingsActivity.labelPath; Utils.copyFileFromAssets(this, SettingsActivity.labelPath, realLabelPath); // 初始化 predictor.init( realModelDir, realLabelPath, SettingsActivity.cpuThreadNum, SettingsActivity.cpuPowerMode, SettingsActivity.inputWidth, SettingsActivity.inputHeight, SettingsActivity.inputMean, SettingsActivity.inputStd, SettingsActivity.scoreThreshold); } } public boolean onTextureChanged(Bitmap ARGB8888ImageBitmap) { String savedImagePath = ""; synchronized (this) { savedImagePath = MainActivity.this.savedImagePath; } // 预测 boolean modified = predictor.process(ARGB8888ImageBitmap, savedImagePath); if (!savedImagePath.isEmpty()) { synchronized (this) { MainActivity.this.savedImagePath = ""; } } lastFrameIndex++; if (lastFrameIndex >= 30) { final int fps = (int) (lastFrameIndex * 1e9 / (System.nanoTime() - lastFrameTime)); runOnUiThread(new Runnable() { public void run() { tvStatus.setText(Integer.toString(fps) + "fps"); } }); lastFrameIndex = 0; lastFrameTime = System.nanoTime(); } return modified; }
-
SettingActivity 实现设置界面各个元素的更新与显示,如果新增/删除界面的某个元素,均在这个类里面实现 备注:
- 参数的默认值可在
app/src/main/res/values/strings.xml查看 - 每个元素的 ID 和 value 是对应
app/src/main/res/xml/settings.xml和app/src/main/res/values/string.xml文件中的值 - 这部分内容不建议修改,如果有新增属性,可以按照此格式进行添加
- 参数的默认值可在
-
Native 实现 Java 与 C++ 端代码互传的桥梁功能 包含三个功能:
init初始化、process预测处理 和release释放 备注: Java 的 native 方法和 C++ 的 native 方法要一一对应
- Native 实现 Java 与 C++ 端代码互传的桥梁功能,将 Java 数值转换为 c++ 数值,调用 c++ 端的完成人脸关键点检测功能 注意: Native 文件生成方法:
cd app/src/java/com/baidu/paddle/lite/demo/face_keypoints_detection
# 在当前目录会生成包含 Native 方法的头文件,用户可以将其内容拷贝至 `cpp/Native.cc` 中
javac -classpath D:\dev\android-sdk\platforms\android-29\android.jar -encoding utf8 -h . Native.java -
Pipeline 实现输入预处理、推理执行和输出后处理的流水线处理,支持多个模型的串行处理
-
Utils 实现其他辅助功能,如
NHWC格式转NCHW格式、字符串处理等 -
新增模型支持
- 在 Pipeline 文件中新增模型的预测类,实现图像预处理、预测和图像后处理功能
- 在 Pipeline 文件中
Pipeline类添加该模型预测类的调用和处理
Android 示例基于 C++ API 开发,调用 Paddle Lite C++s API 包括以下五步。更详细的 API 描述参考:Paddle Lite C++ API 。
#include <iostream>
// 引入 C++ API
#include "include/paddle_api.h"
#include "include/paddle_use_ops.h"
#include "include/paddle_use_kernels.h"
// 1. 设置 MobileConfig
MobileConfig config;
config.set_model_from_file(<modelPath>); // 设置 NaiveBuffer 格式模型路径
config.set_power_mode(LITE_POWER_NO_BIND); // 设置 CPU 运行模式
config.set_threads(4); // 设置工作线程数
// 2. 创建 PaddlePredictor
std::shared_ptr<PaddlePredictor> predictor = CreatePaddlePredictor<MobileConfig>(config);
// 3. 设置输入数据
std::unique_ptr<Tensor> input_tensor(std::move(predictor->GetInput(0)));
input_tensor->Resize({1, 3, 224, 224});
auto* data = input_tensor->mutable_data<float>();
for (int i = 0; i < ShapeProduction(input_tensor->shape()); ++i) {
data[i] = 1;
}
// 如果输入是图片,则可在第三步时将预处理后的图像数据赋值给输入 Tensor
// 4. 执行预测
predictor->run();
// 5. 获取输出数据
std::unique_ptr<const Tensor> output_tensor(std::move(predictor->GetOutput(0)));
std::cout << "Output shape " << output_tensor->shape()[1] << std::endl;
for (int i = 0; i < ShapeProduction(output_tensor->shape()); i += 100) {
std::cout << "Output[" << i << "]: " << output_tensor->data<float>()[i]
<< std::endl;
}
// 例如目标检测:输出后处理,输出检测结果=
auto outputData = outputTensor->data<float>();
auto outputShape = outputTensor->shape();
int outputSize = ShapeProduction(outputShape);
for (int i = 0; i < outputSize; i += 6) {
// Class id
auto class_id = static_cast<int>(round(outputData[i]));
// Confidence score
auto score = outputData[i + 1];
if (score < scoreThreshold_)
continue;
RESULT object;
object.class_name = class_id >= 0 && class_id < labelList_.size()
? labelList_[class_id]
: "Unknow";
object.fill_color = class_id >= 0 && class_id < colorMap_.size()
? colorMap_[class_id]
: cv::Scalar(0, 0, 0);
object.score = score;
object.x = MIN(MAX(outputData[i + 2], 0.0f), 1.0f);
object.y = MIN(MAX(outputData[i + 3], 0.0f), 1.0f);
object.w = MIN(MAX(outputData[i + 4] - outputData[i + 2], 0.0f), 1.0f);
object.h = MIN(MAX(outputData[i + 5] - outputData[i + 3], 0.0f), 1.0f);
results->push_back(object);
}- 将优化后的模型存放到目录
yolov5n_detection_demo/app/src/main/assets/models/下; - 如果模型名字跟工程中模型名字一模一样,即均是使用
yolov5n_coco_for_cpu/model.nb,则代码不需更新;否则话,需要修改yolov5n_detection_demo/app/src/main/java/com.baidu.paddle.lite.demo.object_detection/MainActivity.java中代码:
以更新 ssd_mobilenet_v3 模型为例,则先将优化后的模型存放到 yolov5n_detection_demo/app/src/main/assets/models/ssd_mobilenet_v3_for_cpu/ssd_mv3.nb 下,然后更新代码
// 代码文件 `yolov5n_detection_demo/app/src/main/java/com.baidu.paddle.lite.demo.object_detection/MainActivity.java`
public void checkAndUpdateSettings() {
if (SettingsActivity.checkAndUpdateSettings(this)) {
// old
// String realModelDir = getCacheDir() + "/" + SettingsActivity.modelDir;
// now
String realModelDir = getCacheDir() + "/" + "models/ssd_mobilenet_v3_for_cpu/"; // change modelDir
Utils.copyDirectoryFromAssets(this, SettingsActivity.modelDir, realModelDir);
String realLabelPath = getCacheDir() + "/" + SettingsActivity.labelPath;
Utils.copyFileFromAssets(this, SettingsActivity.labelPath, realLabelPath);
predictor.init(
realModelDir,
realLabelPath,
SettingsActivity.cpuThreadNum,
SettingsActivity.cpuPowerMode,
SettingsActivity.inputWidth,
SettingsActivity.inputHeight,
SettingsActivity.inputMean,
SettingsActivity.inputStd,
SettingsActivity.scoreThreshold);
}
}注意:
- 如果优化后的模型名字不是
model.nb,则需要将优化后的模型名字更新为model.nb或修改yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc中代码
// 代码文件 `yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc`
Detector::Detector(const std::string &modelDir, const std::string &labelPath,
const int cpuThreadNum, const std::string &cpuPowerMode,
int inputWidth, int inputHeight,
const std::vector<float> &inputMean,
const std::vector<float> &inputStd, float scoreThreshold)
: inputWidth_(inputWidth), inputHeight_(inputHeight), inputMean_(inputMean),
inputStd_(inputStd), scoreThreshold_(scoreThreshold) {
paddle::lite_api::MobileConfig config;
// old
// config.set_model_from_file(modelDir + "/model.nb");
// now
config.set_model_from_file(modelDir + "/ssd_mv3.nb"); // change model_name
config.set_threads(cpuThreadNum);
config.set_power_mode(ParsePowerMode(cpuPowerMode));
predictor_ =
paddle::lite_api::CreatePaddlePredictor<paddle::lite_api::MobileConfig>(
config);
labelList_ = LoadLabelList(labelPath);
colorMap_ = GenerateColorMap(labelList_.size());
}-
如果更新模型的输入/输出 Tensor 个数、shape 和 Dtype 发生更新,需要更新文件
yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc的Detector::Preprocess预处理和Detector::Postprocess后处理代码即可。 -
如果需要更新
pascalvoc_label_list标签文件,则需要将新的标签文件存放在目录yolov5n_detection_demo/app/src/main/assets/labels/下,并参考模型更新方法更新yolov5n_detection_demo/app/src/main/java/com.baidu.paddle.lite.demo.object_detection/MainActivity.java代码文件
// 代码文件 `yolov5n_detection_demo/app/src/main/java/com.baidu.paddle.lite.demo.object_detection/MainActivity.java`
public void checkAndUpdateSettings() {
if (SettingsActivity.checkAndUpdateSettings(this)) {
String realModelDir = getCacheDir() + "/" + SettingsActivity.modelDir;
Utils.copyDirectoryFromAssets(this, SettingsActivity.modelDir, realModelDir);
// old
// String realLabelPath = getCacheDir() + "/" + SettingsActivity.labelPath;
// now
String realLabelPath = getCacheDir() + "/" + "new_label_path.txt";
Utils.copyFileFromAssets(this, SettingsActivity.labelPath, realLabelPath);
predictor.init(
realModelDir,
realLabelPath,
SettingsActivity.cpuThreadNum,
SettingsActivity.cpuPowerMode,
SettingsActivity.inputWidth,
SettingsActivity.inputHeight,
SettingsActivity.inputMean,
SettingsActivity.inputStd,
SettingsActivity.scoreThreshold);
}
}- 更新输入数据
- 将更新的图片存放在
yolov5n_detection_demo/app/src/main/assets/images/下; - 更新文件
yolov5n_detection_demo/app/src/main/java/com.baidu.paddle.lite.demo.object_detection/MainActivity.java中的代码
以更新 cat.jpg 为例,则先将 cat.jpg 存放在 yolov5n_detection_demo/app/src/main/assets/images/ 下,然后更新代码
// 代码文件 `yolov5n_detection_demo/app/src/main/java/com.baidu.paddle.lite.demo.object_detection/MainActivity.java`
public boolean onTextureChanged(Bitmap ARGB8888ImageBitmap) {
String savedImagePath = "";
synchronized (this) {
savedImagePath = MainActivity.this.savedImagePath;
}
// update image
Bitmap new_bit;
ARGB8888ImageBitmap = new_bit;
boolean modified = predictor.process(ARGB8888ImageBitmap, savedImagePath);
if (!savedImagePath.isEmpty()) {
synchronized (this) {
MainActivity.this.savedImagePath = "";
}
}
lastFrameIndex++;
if (lastFrameIndex >= 30) {
final int fps = (int) (lastFrameIndex * 1e9 / (System.nanoTime() - lastFrameTime));
runOnUiThread(new Runnable() {
public void run() {
tvStatus.setText(Integer.toString(fps) + "fps");
}
});
lastFrameIndex = 0;
lastFrameTime = System.nanoTime();
}
return modified;
}注意: 本 Demo 是以视频流做输入数据,如果要用图片,可以通过摄像头将图片输入,不用修改代码;或者修改输入 image 参数,将图片以 cv::mat 或 Bitmap 方式传进去
- 更新输入预处理
此处需要更新
yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc中的Detector::Preprocess(const cv::Mat &rgbaImage)方法
注意: 如果模型的的输入 tensor 个数、输入 shape 和数据类型 Dtype 有更新,可以在 Detector::Preprocess(const cv::Mat &rgbaImage) 方法中更新模型的输入
- 更新输出预处理
此处需要更新
yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc中的Detector::Postprocess(std::vector<Object> *results)方法
注意:
-
如果需要更新输出显示效果,可以更新
yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc中的Pipeline::VisualizeStatus(double preprocessTime, double predictTime, double postprocessTime, cv::Mat *rgbaImage)方法 和Pipeline::VisualizeResults(const std::vector<Object> &results, cv::Mat *rgbaImage)方法即可 -
如果模型的的输出 tensor 个数、输出 shape 和数据类型 Dtype 有更新,可以在
Detector::Postprocess(std::vector<Object> *results)方法中更新模型的输出
代码文件:yolov5n_detection_demo/app/src/main/cpp/Pipeline.cc
Pipeline.cc 包含两个类:Detector 和 Pipeline 类
- Detector 用于检测模型的全流程处理,即输入图片预处理、预测处理和输出图片后处理
- Pipeline 用于检测 Demo 全流程处理,即初始化赋值、模型间信息交换、输出结果的显示处理(将结果返回Java/如何在界面回显)
// 检测类的构造函数
Detector::Detector(const std::string &modelDir, const std::string &labelPath,
const int cpuThreadNum, const std::string &cpuPowerMode,
int inputWidth, int inputHeight,
const std::vector<float> &inputMean,
const std::vector<float> &inputStd, float scoreThreshold);
// 检测类的输入预处理函数
void Detector::Preprocess(const cv::Mat &rgbaImage);
// 检测类的输出预处理函数
void Detector::Postprocess(std::vector<Object> *results);
// 检测类的预测函数
void Detector::Predict(const cv::Mat &rgbaImage, std::vector<Object> *results,
double *preprocessTime, double *predictTime,
double *postprocessTime);
// Pipeline 的构造函数
Pipeline::Pipeline(const std::string &modelDir, const std::string &labelPath,
const int cpuThreadNum, const std::string &cpuPowerMode,
int inputWidth, int inputHeight,
const std::vector<float> &inputMean,
const std::vector<float> &inputStd, float scoreThreshold);
// Pipeline 的输出结果显示函数
void Pipeline::VisualizeResults(const std::vector<Object> &results,
cv::Mat *rgbaImage);
// Pipeline 的预测时间、前后处理时间等状态显示函数
void Pipeline::VisualizeStatus(double preprocessTime, double predictTime,
double postprocessTime, cv::Mat *rgbaImage);
// Pipeline 的处理函数,用于模型间前后处理衔接
bool Pipeline::Process(cv::Mat &rgbaImage, std::string savedImagePath);可通过 APP 上的 Settings 按钮,实现目标检测 demo 中些许参数的更新,目前支持以下参数的更新:
参数的默认值可在 app/src/main/res/values/strings.xml 查看
-
model setting:(需要提前将模型/图片/标签放在 assets 目录,或者通过 adb push 将其放置手机目录)
- model_path 默认是
models/yolov5n_coco_for_cpu - label_path 默认是
labels/pascalvoc_label_list
- model_path 默认是
-
CPU setting:
- power_mode 默认是
LITE_POWER_HIGH - thread_num 默认是 1
- power_mode 默认是
-
input setting:
- input_height 默认是
320 - input_width 默认是
320 - input_mean 默认是
0,0,0 - input_std 默认是
1.0,1.0,1.0 - score_threshold 默认是
0.5
- input_height 默认是
如果你觉得当前性能不符合需求,想进一步提升模型性能,可参考首页中性能优化文档完成性能优化。