We read every piece of feedback, and take your input very seriously.
To see all available qualifiers, see our documentation.
Have a question about this project? Sign up for a free GitHub account to open an issue and contact its maintainers and the community.
By clicking “Sign up for GitHub”, you agree to our terms of service and privacy statement. We’ll occasionally send you account related emails.
Already on GitHub? Sign in to your account
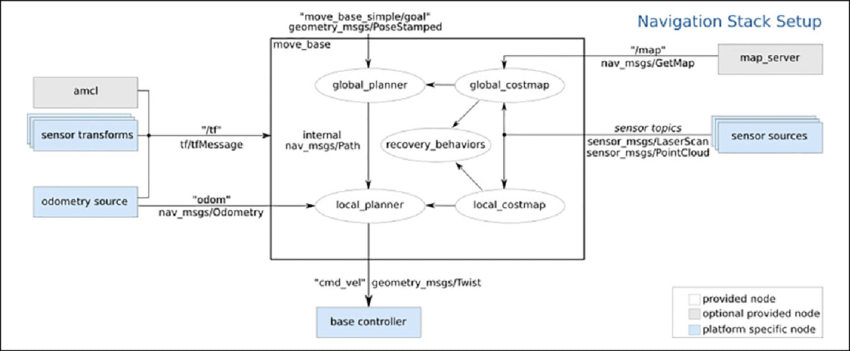
I need a bit of assistance with ROS navigation stack. I am using a Bunker robot from agilex
I am working on obstacle avoidance using RPlidar. Things I have done:
What I am looking for:
I have taken a bit of help from this GitHub repository but still I am confused a bit. Thank you and good day
The text was updated successfully, but these errors were encountered:
No branches or pull requests
I need a bit of assistance with ROS navigation stack.
I am using a Bunker robot from agilex
I am working on obstacle avoidance using RPlidar.
Things I have done:
What I am looking for:
I have taken a bit of help from this GitHub repository but still I am confused a bit. Thank you and good day
The text was updated successfully, but these errors were encountered: