sudo apt install ros-noetic-rviz-imu-plugin -y
sudo apt install socat -y
Due to a bug in rosserial_phyton in ROS noetic, the device does not disconnect properly, instead it times out, and disconnects after 20 second. The bug in rosserial_phyton has been fixed, and will be distributed with the next ros update, but until then, if you are using noetic use the latest version of SerialClient.py from roserial_python
FXIMU does not need a driver, or additional software to connect to ROS, however launch and configuration files are presented in a package for convenience to the user.
To get the fximu package:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/altineller/fximu.git
catkin_make
source ~/catkin_ws/devel/setup.bash
Once you have the fximu package, go to launch directory and edit fximu.launch:
roscd fximu/launch
nano fximu.launch
In this file, we load two set of parameters, the first fximu_params.yaml file contains parameters about the operation of the device, and the numbered fximu_params_000.yaml file contains parameters about calibration of that specific device.
<launch>
<rosparam command="load" file="$(find fximu)/config/fximu_params.yaml" />
<rosparam command="load" file="$(find fximu)/config/fximu_params_000.yaml" />
<include file="$(find fximu)/launch/fx.launch">
<arg name="serial_device" value="/dev/ttyACM0"/>
</include>
</launch>
Edit the 000 in fximu_params_000.yaml string, to match the serial_id of your FXIMU.
Edit the ttyACM0 string at the end to match your serial port, and save file.
Before running the full demo, lets see if the connection works first. Open a terminal and launch fximu.launch
roscd fximu/launch
roslaunch fximu.launch
You should see:
process[serial_node_fximu-2]: started with pid [1652]
[INFO] [1614953635.669295]: ROS Serial Python Node
[INFO] [1614953635.672512]: Connecting to /dev/ttyACM0 at 230400 baud
[INFO] [1614953637.777565]: Requesting topics...
[INFO] [1614953637.839926]: Note: publish buffer size is 512 bytes
[INFO] [1614953637.841215]: Setup publisher on imu/data [sensor_msgs/Imu]
[INFO] [1614953637.844869]: Setup publisher on imu/mag [sensor_msgs/MagneticField]
[INFO] [1614953637.848249]: Setup publisher on imu/raw [std_msgs/Int16MultiArray]
[INFO] [1614953637.868916]: calibration_mode: 0
[INFO] [1614953637.882941]: FXIMU Parameters read from EEPROM
[INFO] [1614953637.897206]: Firmware Revision: 01MARCH2021
[INFO] [1614953637.899882]: sensor_read_rate: 400
[INFO] [1614953637.902283]: output_rate_divider: 8
[INFO] [1614953637.910633]: adaptive_gain: 1
[INFO] [1614953637.913407]: bias_estimation: 1
[INFO] [1614953637.925089]: gain_acc: 0.020
[INFO] [1614953637.929318]: gain_mag: 0.010
[INFO] [1614953637.934133]: bias_alpha: 0.100
[INFO] [1614953637.939420]: imu_frame_id: imu_link
[INFO] [1614953637.943528]: mag_frame_id: imu_link
[INFO] [1614953637.953971]: GFSR: 2
[INFO] [1614953637.958144]: AFSR: 1
[INFO] [1614953637.962534]: steady_limit: 32
[INFO] [1614953637.966951]: world_frame: 0
[INFO] [1614953637.971072]: use_mag: 1
[INFO] [1614953637.981785]: kAngularVelocityThreshold: 0.060
[INFO] [1614953637.986130]: kAccelerationThreshold: 0.250
[INFO] [1614953637.990327]: kDeltaAngularVelocityThreshold: 0.050
[INFO] [1614953637.995843]: mag_offsets: 19.190, -19.830, -67.510
[INFO] [1614953638.009829]: soft_iron_matrix[0]: 0.977, -0.034, -0.014
[INFO] [1614953638.023886]: soft_iron_matrix[1]: -0.034, 0.992, 0.020The FXIMU comes calibrated, and the calibration values are read from device at bootup, when calibration_mode=0
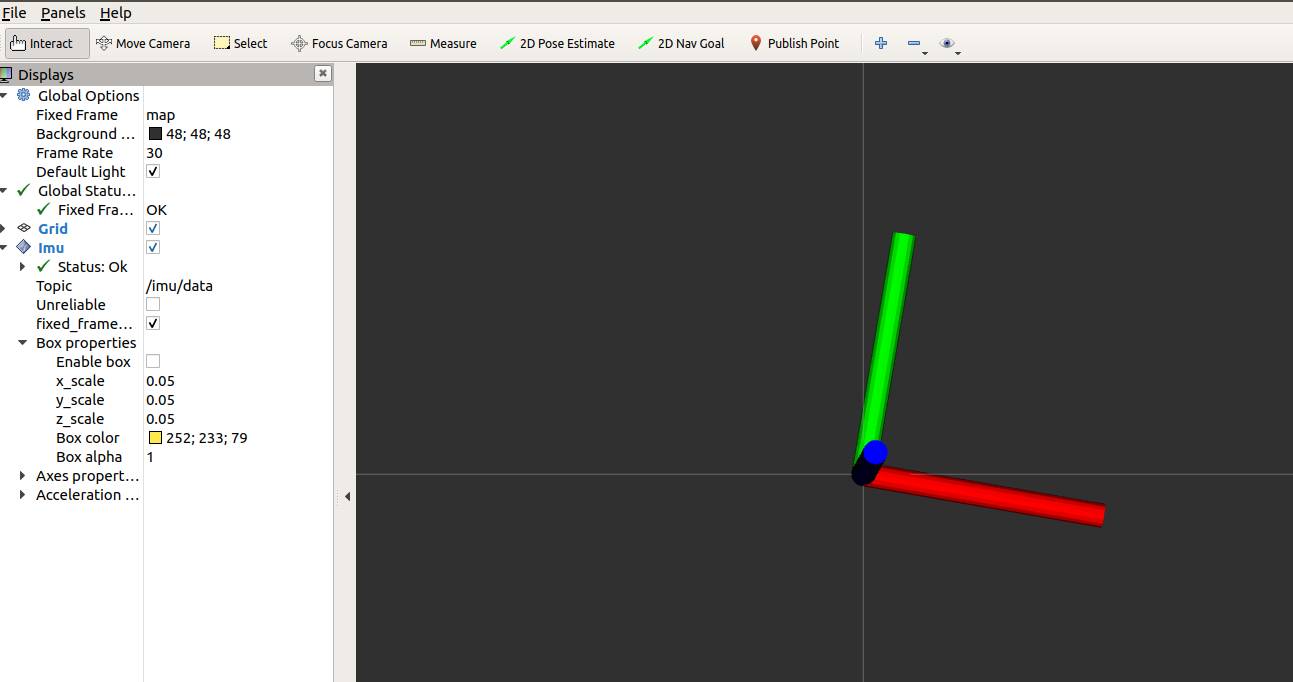
If you connected successfully to the device, Press CTRL-C to stop, and this time run roslaunch fxviz.launch to run the full demo, which launches the serial connection, then launches RVIZ with custom configuration. Note that rviz imu plugin is required to visualize imu data.
Licenses
 |
 |
|---|