This repository contains code for visualizing robot capability specially wrench polytope capacity of cable driven shoulder joint. The shoulder joint is passive and placed at the center. The cable driven shoulder joint is driven by n+3 cables i.e 3 dof joint driven by 6 cables for more workspace. This could be used in many applications like exoskeletons, tensegrity joints, parallel robots.
- MPT3: for the computational geometry tools .
The video below shows a simple trajectory followed by cable driven shoulder joint showing active wrench capacity using polytope representation and also becomes degenerate when the joint is at singular configuration.
A library of graphical and computational tools has been written in order to simplify the analysis and to provide a sophisticated and effective mockup.

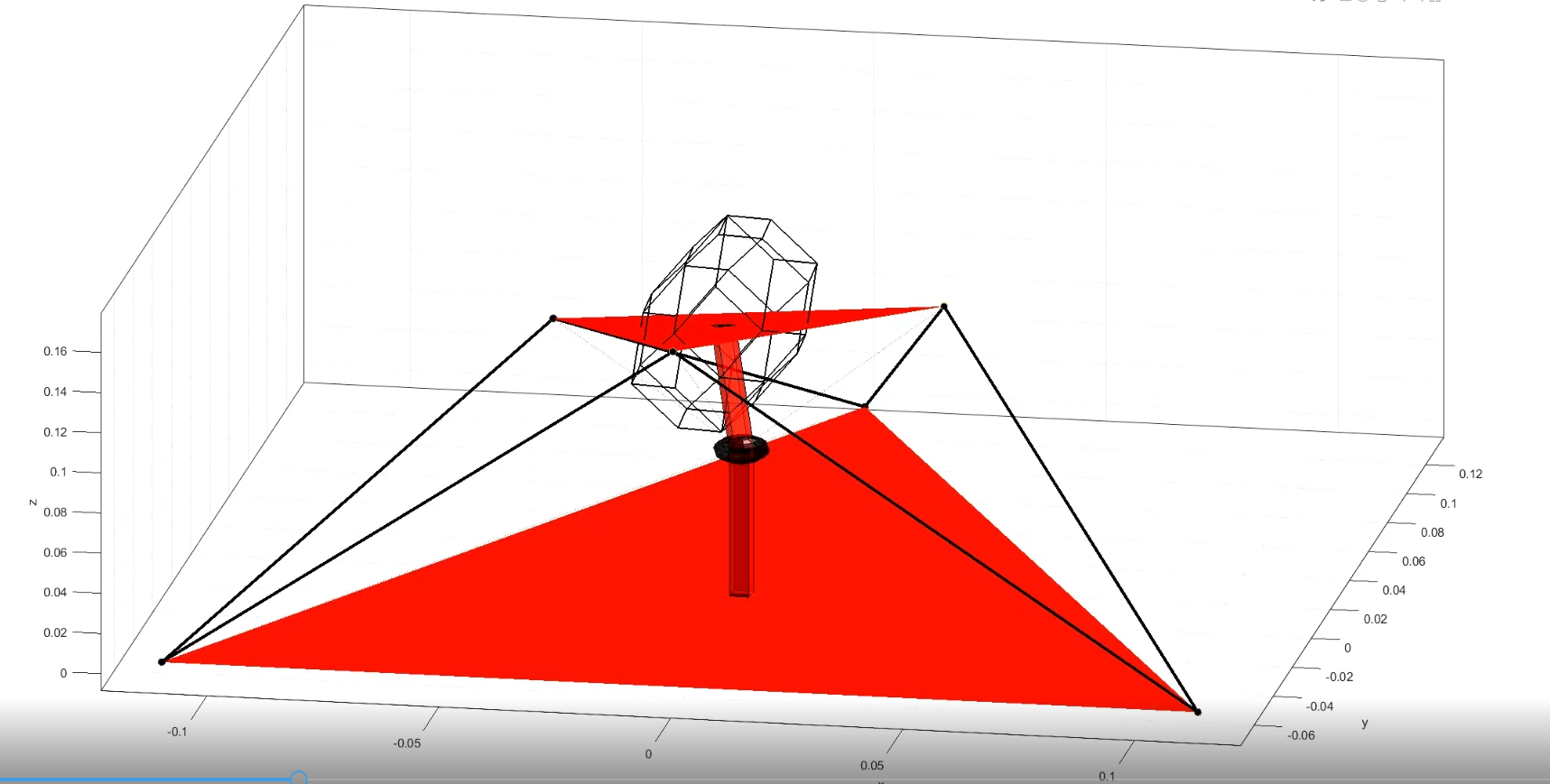
The degenerated polytope ie plane is shown for the particular configuration of the cable driven shoulder joint

The scaled wrench set of the cable driven shoulder joint is shown in the graphic mockup below

This repository is maintained by:
| Vishal Ramadoss |