Sharing Road Test for Autoware release/2024.07 branch -- Test Case 4 #5242
cyn-liu
started this conversation in
Show and tell
Replies: 1 comment
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
-
Hello everyone. I'm delighted to share with you the results of our road testing of the release/2024.07 branch of Autoware for autonomous driving.
We did road testing 3 weeks ago and found [a bug in the perception module] (autowarefoundation/autoware.universe#8530), after which was resolved with the help of AWF PR, and we tested the following test cases:
1. Test Case
2. Test Facility
2.1 EGO Vehicle
Dell Precision 3581
2.2 Test Yard Elements
2.3 Standard Scenarios
Initial Condition
Action
Test case requirements: NPC1 starts after EGO stops in the goal search section.
However, this requirement conflicts with this test case. In the goal search stage, EGO does not stop, but searches for a sufficient space near the initial goal pose to park.
Therefore, during our testing, when Autoware start goal search, NPC1 start to driver away.
3. Test Outcome
3.1 Condition
EGO successfully reached the goal position without colliding with NPCs.
3.2 Test Process Analysis
In the goal search section, Autoware understands that there is an insufficient space near the goal position and intends to modify the given goal pose.
At this time, NPC1 drives away, and Autoware detects the disappearance of NPC1, assuming that there is sufficient space near the initially goal position.
Therefore, Autoware will not modify the goal point, or modifiy the goal point to near the initial goal pose.
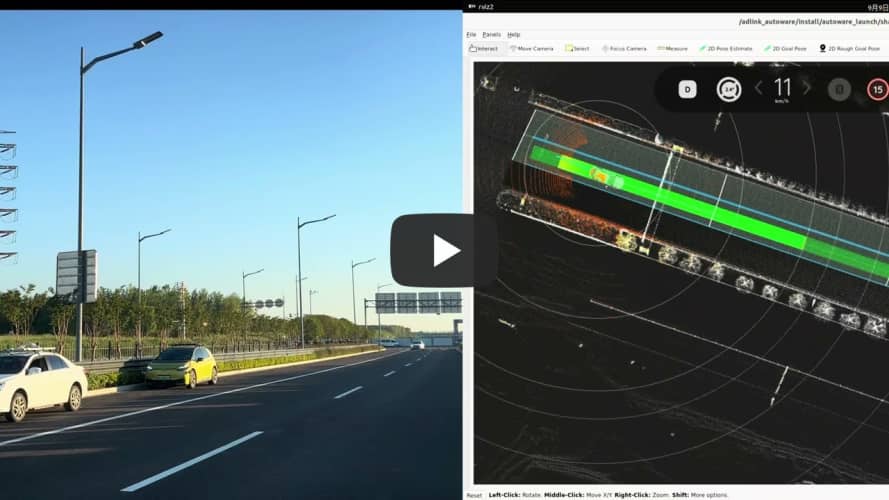
3.3 Test Vedio
The road test video will be shared in the future
Beta Was this translation helpful? Give feedback.
All reactions