This repo hosts the PyTorch dataloader for FewSOL dataset.
First install the package using
pip install FewSOLDataLoaderStep-1. Download the FewSOL dataset from https://irvlutd.github.io/FewSOL/#data
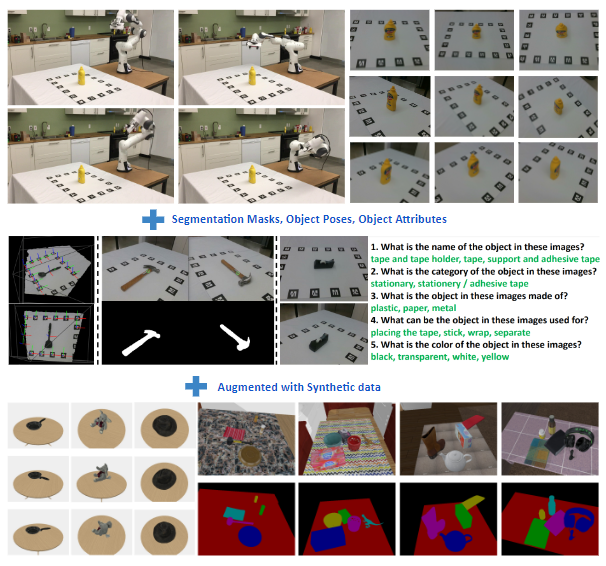
- There are four splits of the FewSOL dataset:
real_objects: This is a real single object image split. Each object was captured from 9 anglesreal_clutter: This is a real clutter image split extracted from the OCIDsynthetic_objects: This is a synthetic single object image split made with 3D google objects. Each object was captured from 9 anglesgoogle_clutter: This is a synthetic clutter image split made with 3D google objects- Note: The
google_clutterdataloader may take ~60 seconds to instantiate
- Note: The
- Note: The synthetic portion of the dataset is created using Google 3D Scanned Objects dataset.
Step-2. Pass the extracted dataset directory path into the dataloader as shown in the following example
import random
from FewSOLDataLoader import load_fewsol_dataloader
# Define the root directory
ROOT_DIR = os.getcwd()
# Define the dataset root directory using the join_path function
DATASET_ROOT_DIR = os.path.join(ROOT_DIR, 'FewSOL', 'data')
data = load_fewsol_dataloader(DATASET_ROOT_DIR, split="real_objects")
# Generate a random index within the range of the dataloader's length
rand_idx = random.randint(0, len(data) - 1)
# Retrieve data from the dataloader for the random index
image_data, mask_data, bbox_data, label, questionnaire, file_name, poses = data[rand_idx]
# Synthetic objects and Real objects split also has a depth functionality
if s in ['synthetic_objects','real_objects']:
depth = test.get_depth(rand_idx)
print("Depth shape:", depth.shape)# Retrieve data from the dataloader for the random index
# Default loads all data, Data not loaded will be None
image_data, mask_data, bbox_data, label, questionnaire, file_name, poses = data.get_idx(
rand_idx,
load_img=False,
load_mask=True,
load_bbox=True,
load_label=False,
load_que=False,
load_pose=False,
)# Gets the list of indexs for that contains a specific class
class_idxs = data.get_class_idx("bowl")
rand_class_idx = class_idxs[random.randint(0, len(class_idxs) - 1)]# Functions supports 3D(color images) and 2D(no rgb axis)
from FewSOLDataLoader.helpers import crop_obj_using_bbox
rand_obj_idx = random.randint(0, len(label) - 1)
cropped_img = crop_obj_using_bbox(image_data[0], bbox_data[0, rand_obj_idx])-
Image Data Shape
# n x c x w x h # n = Number of total images # c = Number of Channels (RGB) # w = Width of the Image # h = Height of the image -
Semantic Segmentation Shape
# n x m x w x h # n = Number of total images # m = Total number of objects in the current images # w = Width of the Image # h = Height of the image -
Detection Bounds Shape
# n x m x r # n = Number of total images # m = Total number of objects in the current images # r = 4 : x, y, width, height -
Pose Information
# n x m x 4 x 4 # n = Number of total images # m = Total number of objects in the current images -
Label Output/Description Shape
# m = Total number of objects in the images
All files are licensed under the MIT license except for the below two inside FewSOL-DataLoader/src/FewSOLDataLoader/
SingleRealPose.py- licensed under the NVIDIA Source Code License - Non-commercial as found here.CocoFormatConverter.py- licensed under the CC BY 4.0 LEGAL CODE as found here.
Please cite FewSOL if it helps your research:
@INPROCEEDINGS{padalunkal2023fewsol,
title={{FewSOL: A Dataset for Few-Shot Object Learning in Robotic Environments}},
author={P, Jishnu Jaykumar and Chao, Yu-Wei and Xiang, Yu},
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
doi={10.1109/ICRA48891.2023.10161143},
pages={9140-9146},
year={2023}
}