
This module is able to read from and configure ublox GPS modules through their UBX binary protocol over a serial connection. It can be considered a wrapper around the pyserial module.
A ublox 8 device was used to develop and test this library in combination with the documentation provided by ublox. Many of the messages specified in this document should also be compatible with earlier versions of the device (4/5/6/7) but others might not be backwards compatible.
Move to main directory and issue:
$ python2 -m pytest
$ python3 -m pytest-
- CFG-MSG (0x06 0x01)
- CFG-RATE (0x06 0x08)
- CFG-CFG (0x06 0x09)
- CFG-NAV5 (0x06 0x24)
- ...
-
- NAV-POSLLH (0x01 0x02)
- NAV-DOP (0x01 0x04)
- NAV-SOL (0x01 0x06)
- NAV-PVT (0x01 0x07)
- ...
-
- ACK-NAK (0x05 0x00)
- ACK-ACK (0x05 0x01)
- ...
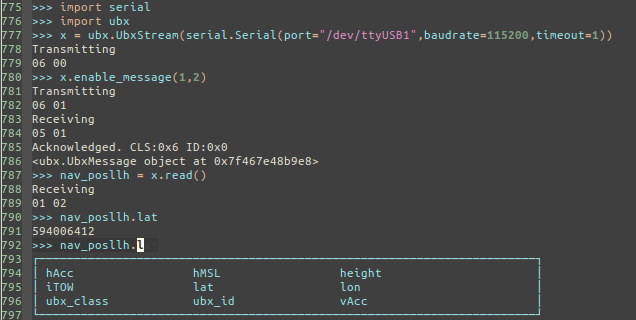
One would usually create a serial connection to the GPS module and proceed to
create an instance of UbxStream through which one reads data and sends
configuration messages.
The UbxStream class comes with functions to save, load and reset configurations
as well as an automated way to disable all enabled-by-default NMEA messages.
Of course one can enable/disable specific messages by passing in the documented
message class and id.
One can auto detect serial ports and set the baudrate for the connection.
- When using the default .read() method the internal message buffer gets cleared, taking in some fresh data first. This seems to have the effect that certain messages are never read while they are activated. One way around this is to read from a loop and check for the message you're interested in:
>>> while(True):
... y = x.read()
... if(y.ubx_id == '04'):
... break
...
Receiving
01 02
Receiving
01 04
>>> y
<ubx.UbxMessage object at 0x7f7a9dcf7be0>- Alternatively one can disable the flushed read as in the following example. NB! since you're reading from a stale buffer you're data will be old unless you read often and/or throw in an occasional flushed .read().
>>> x.read(reset=False)
Receiving
01 07
<ubx.UbxMessage object at 0x7f7a9dc69438>- For low power consumption use-cases one can increase the time between GNSS measurements. Value given is in milliseconds resulting in a calculated frequency. E.g. 1000ms == 1Hz (This is indicated by u-blox as a good default). Thanks @hankedan000 :)
>>> x.cfg_rate(1000)
Receiving
05 01
Acknowledged. CLS:0x6 ID:0x8
<ubx.UbxMessage object at 0x7f8d895ea518At the moment only activated messages can be read and there is no support yet for polling specific messages. If any desired messages are not included please create an issue.