- ubuntu 20.04
- ros galactic
- mmdetection3d with commit id: fe25f7a51d36e3702f961e198894580d83c4387b
mmdetection3d environment: https://mmdetection3d.readthedocs.io/zh-cn/latest/get_started.html
make sure this can run https://mmdetection3d.readthedocs.io/zh-cn/latest/get_started.html#id5
robot and server communicate with wifi, using cyclone as dds
under untrustworthy network condition, strongly recommend using pcl to preprocess pointcloud using for 3d object detection,for example https://github.com/TonyTnT/pcl_example
download weight and config (if pulled mmdet3d repo, the configs in mmdetection3d/projects or mmdetection3d/configs )
colcon build --packages-select mmdet3d_ros2 --symlink
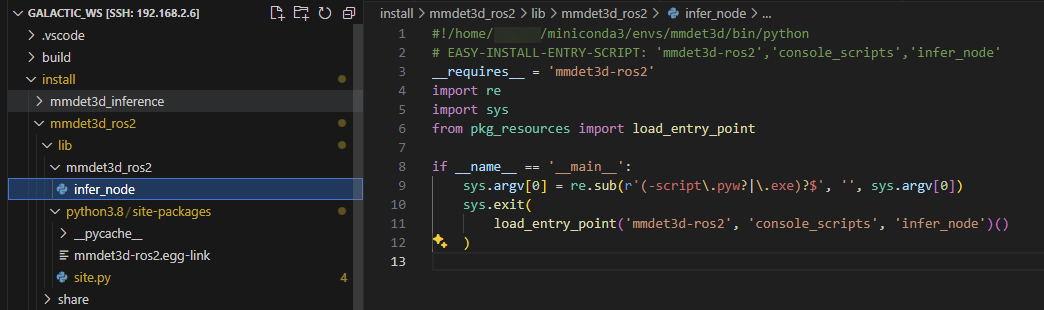
then modify the python interpreter path
source install/setup.bash
ros2 launch mmdet3d_ros2 mmdet3d_infer_launch.py