Howdy! 🤠
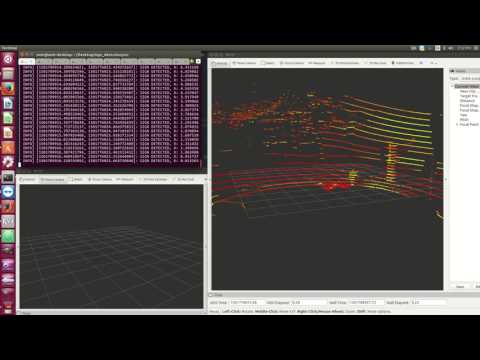
This is a little package I made while in Undergraduate to perform some basic intensity filtering from a LIDAR PointCloud2 message to obtain a filtered pointcloud of street signs.
- ROS-Kinetic (untested with Melodic)
- PCL-ROS
Git clone to your catkin_ws
Then
cd catkin_ws
rosdep install rosdep install --from-paths src --ignore-src -r -yThis package was tested with the Velodnye VLP-16 LIDAR. With the VLP-16, I was reliabily able to detect stop signs from up to 10 meters away.
In theory, any other LIDAR that outputs a Pointcloud2 message with intensity should work, provided that there is enough points.
/velodyne_points
/sd_pointcloud_filtered-- Filtered Pointcloud2 message of the sign/sd_distance-- Distance to the sign/visualization_marker-- Visualation Marker message of the sign for RViz