Modified version of rpg_svo(commit d616106 on May 9, 2017) which implement a Semi-direct Monocular Visual Odometry pipeline
[TOC]
-
Boost - C++ Librairies (thread and system are needed)
-
Eigen 3 - Linear algebra
-
OpenCV - Computer vision library for loading and displaying images
-
Sophus - Lie groups
- recommend version: commit id a621ff
-
Fast - Corner Detector
-
g2o - General Graph Optimization OPTIONAL
- recommend version: commit id ff647bd (ff647bd7537860a2b53b3b774ea821a3170feb13)
export G2O_ROOT=$HOME/installdir
- recommend version: commit id ff647bd (ff647bd7537860a2b53b3b774ea821a3170feb13)
-
rpg_vikit (git submodule)
git clone https://github.com/cggos/svo_cg.git --recursive
# or
git clone https://github.com/cggos/svo_cg.git
git submodule init
git submodule updatecatkin_makeorcatkin build
-
build vikit_common
cd 3rdParty/rpg_vikit/vikit_common gedit CMakeLists.txt # SET(USE_ROS FALSE) mkdir build & cd build cmake .. & make -j3 sudo make install
-
build svo
mkdir build & cd build cmake -DUSE_ROS=FALSE .. & make -j3
- on a Dataset (airground_rig_s3_2013-03-18_21-38-48.bag)
roslaunch svo_ros test_rig3.launch [rviz:=true] rosbag play airground_rig_s3_2013-03-18_21-38-48.bag - on a live camera stream (eg. RealSense ZR300 fisheye camera)
# 1. calibrate your camera and modify `svo_ros/param/camera_atan_zr300.yaml` # 2. run roslaunch svo_ros realsense_zr300.launch [rviz:=true]
- on a Dataset (sin2_tex2_h1_v8_d.tar.gz)
export SVO_DATASET_DIR=${HOME}/Datasets # .bashrc source ~/.bashrc cd ${SVO_DATASET_DIR} [tsocks] wget http://rpg.ifi.uzh.ch/datasets/sin2_tex2_h1_v8_d.tar.gz -O - | tar -xz cd svo mkdir build & cd build cmake .. & make ./test_pipeline
- ATAN model (preference)
- which is also used by PTAM and uses the FOV distortion model
- calibration tool: PTAM Calibration
- Pinhole model
- three radial and two tangential distortion parameters
- calibration tool: camera_calibration (ROS)
- Ocam model (by Davide Scaramuzza)
- model cameras with high field of view or even omnidirectional cameras
- calibration tool: OCamCalib toolbox
use the python scripts in scripts directory
- kalibr_to_svo.py
- omni_matlab_to_rpg.py
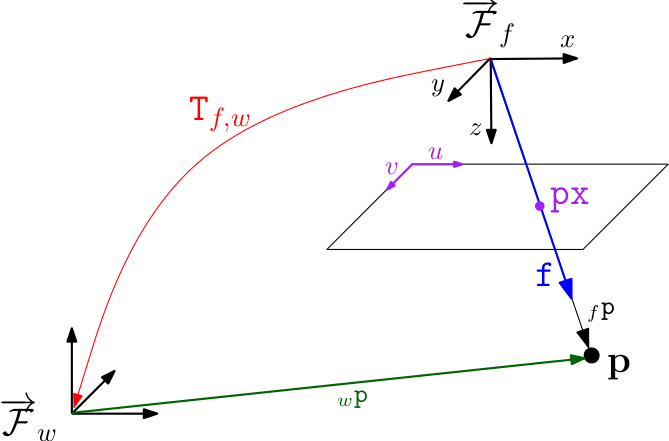
- px - Pixel coordinate (u,v)
- f - Bearing vector of unit length (x,y,z)
- T_f_w - Rigid body transformation from world frame w to camera frame f
- transforms a point in world coordinates p_w to a point in frame coordinates p_f as follows
p_f = T_f_w * p_w - camera position in world coordinates must be obtained by inversion
pos = T_f_w.inverse().translation()
In order to obtain the same performance as shown in the videos, consider the following:
- Use a global shutter camera (we use a grayscale matrix-vision bluefox camera, WVGA resolution).
- Set the framerate of the camera as high as possible (we use 70fps).
- Depending on your camera driver it might be better to manually fix the shutter speed and gain to avoid flickering.
- Use a lens with large field of view (we have approx. 110 deg).
- Calibrate the camera with the ATAN model and make sure you have a very low reprojection error (~0.1px).
- For higher robustness, you can increase the number of tracked features by setting the parameter svo/max_fts to 180.
- Avoid motions of pure rotation.
- The keyframe selection is currently designed for downlooking cameras. Forward motions are not performing well at the moment.
- Forward motions
- The current keyframe selection criterion is designed for downward looking cameras. This is one reason why SVO does not work well for forward motions (e.g., to be used on a car).
- Image resolution
- The current parameters are tuned for WVGA resolution. If you use a higher resolution camera, then the pyramid levels should be increased as well as the reprojection error thresholds.
@inproceedings{Forster2014ICRA,
author = {Forster, Christian and Pizzoli, Matia and Scaramuzza, Davide},
title = {{SVO}: Fast Semi-Direct Monocular Visual Odometry},
booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2014}
}SVO 2.0: Fast Semi-Direct Visual Odometry for Monocular, Wide Angle, and Multi-camera Systems.
SVO 2.0 (IEEE TRO'17) extends the original SVO implementation (ICRA' 14) with the addition of edgletes, IMU prior, wide angle cameras (fisheye and catadioptric), multi-camera configurations, and forward looking camera motion.