Comprehensive pipeline for synthesizing a large dataset from a nonlinear model-predictive controller (MPC) with parametric sensitivities, training a neural network approximation of this dataset, and deploying that neural network controller on an embedded microcontroller (STM32G4) to control the swing-up and stabilization of a cartpole pendulum system.
This code is supplementary material to the paper: Hose, Henrik, Alexander Gräfe, and Sebastian Trimpe. "Parameter-Adaptive Approximate MPC: Tuning Neural-Network Controllers without Retraining." accepted to the 6th Annual Learning for Dynamics & Control Conference L4DC (2024).
Please cite our paper as:
@inproceedings{hose2024parameter,
title={Parameter-Adaptive Approximate MPC: Tuning Neural-Network Controllers without Retraining},
author={Hose, Henrik and Gr{\"a}fe, Alexander and Trimpe, Sebastian},
booktitle={Learning for Dynamics and Control Conference},
year={2024},
organization={PMLR}
}
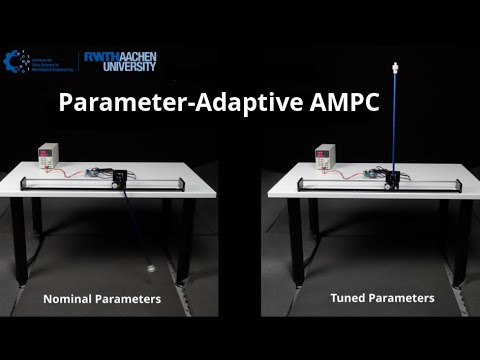
A video of our experiments conducted with this code is available here:
The code inside this repo is structured in the three main steps of distilling a neural network approximation from a model predictive controller (MPC):
- A large dataset is computed by repeatedly solving the MPC optimization problem for random initial conditions, for which the code is provided in the dataset_synthesis folder. We use Pyomo to formulate the optimization problem and sIPOPT for solving it. See the respective README.md for details. You can also skip this step by downloading the dataset that we used for our experiments from Zenodo, here (3.5Gb).
- A neural network is trained to approximate an explicit controller for the dataset. We use Jax to train two neural networks, one for the optimal action sequence and one for the sensitivities. See the README.md for details. You can skip this step and use the neural network approximation of the optimal actions here and the sensitivities here that we trained already.
- The parameter-adaptive approximate MPC is deployed on an STM32G474 microcontroller to control a cartpole inverted pendulum. We use a Nucleo-G474RE board with an X-Nucleo-IHM08M1 shield as motor driver, a commercially available Quanser cartpole system and a self-build one from the Max Planck Institute for Intelligent Systems. The code running on the microcontroller uses the modm embedded library builder and some automatic code generation with jinja templates, which is used to export the neural network as C++ code here. See the pendulum_embedded for details. You can skip the code generation also find the generated embedded C++ implementation here.