{kind=link}
C++ - Simple yet effective KDtree implementation with (exact) find k nearest neighbours capability.
Eigen 3.3.90 and OpenCV 3.1 if you want to run test_performance
./clean.sh; ./build.sh
./run.sh
#include "KDtree.hpp"
#include <iostream>
#include <array>
int main(int argc, char* argv[]) {
using TYPE = float;
std::array<std::array<TYPE,2>,8> data = {{{{1.1, 0.6}},{{0.4, 0.5}},{{0.2, 0.6}},{{0.5, 0.9}},
{{1.2, 0.3}},{{0.7, 0.4}},{{0.8, 1.0}},{{0.1, 0.2}}}};
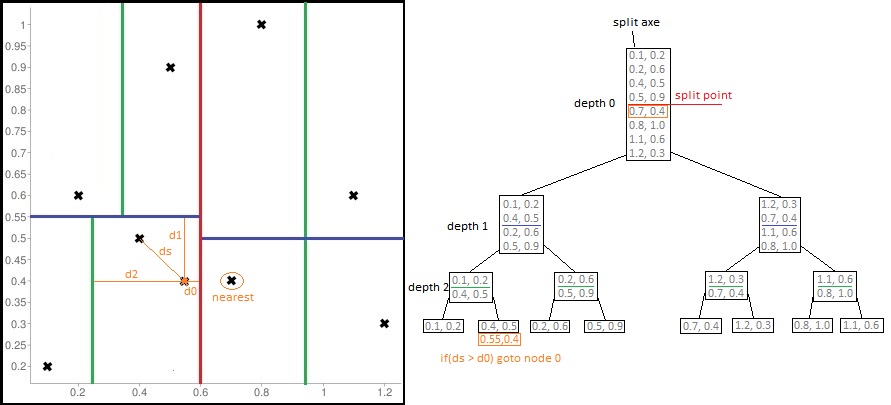
KDtree<TYPE,8,2> kdtree(&data);
auto node = kdtree.get_node0();
std::cout << "Is root node? " << std::boolalpha << node->is_root() << "\n";
std::cout << "Split point(0)=\n" << node->get_split_point() << "\n";
node = node->go_left();
std::cout << "Split point(1a)=\n" << node->get_split_point() << "\n";
node = node->go_left();
std::cout << "Split point(2a)=\n" << node->get_split_point() << "\n";
node = node->go_back();
node = node->go_right();
std::cout << "Split point(2b)=\n" << node->get_split_point() << "\n";
// node_data is an Eigen::Map (view) of the original data
auto node_data = node->get_data_sliced();
std::cout << "The point nearest to (0.55,0.4) is: \n";
std::array<TYPE,2> sample = {0.55,0.4};
auto nearest_samples_idx = kdtree.find_k_nearest<Distance::euclidean>(1, sample);
for(auto& ns:nearest_samples_idx){
for(auto& v:data[ns])
std::cout << v << ",";
std::cout << "\n";
}
return 0;
}The output:
Is root node? true
Split point(0)=
0.6
Split point(1a)=
0.55
Split point(2a)=
0.25
Split point(2b)=
0.35
The point nearest to (0.55,0.4) is:
0.7,0.4,
For low dimensional data the KDtree produces faster results comapred to brute force algorithms whereas for high dimensional data (>10) brute force becomes a better solution.
*
* Tested on an Intel quad-core hyperthreading i7-4700MQ 2.4GHz 64 bits architecture
* The results are in milliseconds (mean & std-dev). The results correspond to the time
* required to classify 100 test samples with a training dataset of 10000 samples
*
------------------------------------------------------------------------------------------
Dimensionality = 2
my BruteForce my KDtree OpenCV BruteForce OpenCV KDtree
Time elapsed (k= 1) 8(+- 0) 1(+- 0) 34.2(+- 0.4) 4.8(+- 9.6)
Time elapsed (k= 2) 11.4(+- 0.49) 2(+- 0) 34.8(+- 0.748) 0.4(+- 0.49)
Time elapsed (k= 5) 19(+- 0) 4(+- 0) 33(+- 3.03) 0.2(+- 0.4)
Time elapsed (k=10) 25.6(+- 0.49) 8.4(+- 0.49) 35.4(+- 0.49) 1(+- 0)
Time elapsed (k=50) 144(+- 3.16) 52(+- 5.4) 40.4(+- 4.45) 3(+- 0)
*
------------------------------------------------------------------------------------------
Dimensionality = 3
my BruteForce my KDtree OpenCV BruteForce OpenCV KDtree
Time elapsed (k= 1) 14.4(+- 0.49) 2.6(+- 0.49) 31(+- 1.55) 4(+- 7.51)
Time elapsed (k= 2) 13.4(+- 0.49) 3.2(+- 0.4) 30(+- 0) 0(+- 0)
Time elapsed (k= 5) 19.8(+- 0.4) 5.4(+- 0.49) 23.2(+- 0.4) 0(+- 0)
Time elapsed (k=10) 38.4(+- 0.49) 16(+- 0) 39.8(+- 0.4) 2(+- 0)
Time elapsed (k=50) 155(+- 4.26) 93.6(+- 1.2) 47.8(+- 0.748) 5(+- 0)
*
------------------------------------------------------------------------------------------
Dimensionality = 10
my BruteForce my KDtree OpenCV BruteForce OpenCV KDtree
Time elapsed (k= 1) 34(+- 0.632) 47(+- 0) 52.6(+- 5.31) 18.2(+- 7.91)
Time elapsed (k= 2) 31.2(+- 3.12) 51.2(+- 0.748) 63(+- 0.632) 26.8(+- 0.748)
Time elapsed (k= 5) 45.2(+- 0.4) 60.2(+- 0.748) 62.4(+- 0.49) 42.6(+- 0.49)
Time elapsed (k=10) 57.8(+- 0.748) 62(+- 5.87) 64.6(+- 3.72) 66.6(+- 4.32)
Time elapsed (k=50) 170(+- 2.19) 194(+- 1.79) 71.8(+- 0.4) 141(+- 5.11)
*
------------------------------------------------------------------------------------------
Dimensionality = 100
my BruteForce my KDtree OpenCV BruteForce OpenCV KDtree
Time elapsed (k= 1) 359.8(+- 2.79) 484(+- 26.1) 284(+- 15.9) 515(+- 10.1)
Time elapsed (k= 2) 351(+- 15.6) 479(+- 9.03) 281(+- 14.8) 504(+- 25.6)
Time elapsed (k= 5) 358(+- 15.1) 474(+- 25.3) 292(+- 1.2) 497(+- 3.72)
Time elapsed (k=10) 383(+- 2.42) 493(+- 6.77) 292(+- 1.33) 508(+- 8.2)
Time elapsed (k=50) 499(+- 3.76) 629(+- 5.16) 303(+- 2.19) 510(+- 4.87)
*
------------------------------------------------------------------------------------------
Dimensionality = 200
my BruteForce my KDtree OpenCV BruteForce OpenCV KDtree
Time elapsed (k= 1) 716(+- 50.2) 930(+- 58.4) 557(+- 37.1) 695(+- 32.5)
Time elapsed (k= 2) 606(+- 87.8) 761(+- 142) 555(+- 39.7) 695(+- 52.3)
Time elapsed (k= 5) 722(+- 47.3) 781(+- 135) 555(+- 26.8) 733(+- 19.5)
Time elapsed (k=10) 675(+- 62.1) 960(+- 43.6) 545(+- 41.3) 717(+- 43)
Time elapsed (k=50) 861(+- 37.2) 1.04e+03(+- 55.3) 550(+- 69.3) 732(+- 35.7)
This project is licensed under the MIT License - see the LICENSE.md file for details