Click para ver el Video
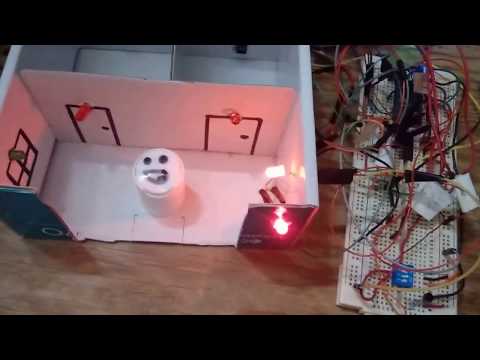
Sistema de control domótico. Permite interactuar con dispositivos de la casa mediante una interfaz gráfica en PyQt4 y comandos de voz que son procesados por una red neuronal en Tensorflow, toda la información se encuentra en una base de conocimiento en SWI-Prolog.
El asistente de voz lista los objetos en el cuarto según la ubicación de la persona en la casa (sensores infrarrojos) y la red neuronal reconoce las palabras sí y no, si la palabra es sí cambia de estado el objeto (encender/apagar) y si la palabra es no deja el objeto sin cambios.
Este proyecto hace uso de las siguientes herramientas/librerías:
- Webcam
- Arduino
- Arduino Micro
- Arduino IDE
- Sensores infrarrojos CNY70
- Sensor de temperatura DS18B20
- C.I 74HC595 (Registro de corrimiento)
- LEDs
- Librería OneWire
- Librería DallasTemperature
- SWI-Prolog
- Espeak
- Python
- Python 3.4
- PySerial (Comunicación serial con Arduino)
- Speake3 (Espeak)
- PySWIP (Permite interactuar con el interprete de Prolog)
- PyQt4 (Interfaz gráfica)
- Tensorflow (Red Neuronal)
- LibROSA (Procesamiento de Audio)
- SciPy, Numpy y Pandas
El modelo usado es un clasificador. Se introducen 2600 Mel-frequency cepstral coefficients extraídos de 3 segundos de audio, solo dos clases de salida (Sí/No), dos capas ocultas; la primera tiene 1800 neuronas y la segunda 500.
La red se entrenó con un dropout de 75%, factor de aprendizaje de 0.0001 usando Adam Optimizer y tomando sets de 5 muestras (mini batch) hasta completar todo los datos (1 época), el proceso se repitió por por 50 épocas.
Al final la red quedo sobre entrenada pero mostró buenos resultados con los datos de prueba que no había visto la red, aún así tengo que pronunciar las palabras de forma parecida a las muestras para que sean mejor reconocidas.


Más información sobre el funcionamiento de la red y los Mel-frequency cepstral coefficients en este Jupyter Notebook (Info/RedNeuronal.ipynb)
(!) Esta guía se creo para ser utilizada en Debian o Raspbian Jessie y posiblemente Ubuntu (No lo probé) (!) Puedes utilizar apt-get en lugar de aptitude (gusto personal)
- Pip es el gestor de paquetes oficial de python (librerías)
- Venv permite instalar paquetes para python en un entorno aislado sin interferir con las librerías del sistema
sudo aptitude install python3 python3-pip python3-dev python3-venvmkdir ~/venvs
mkdir ~/venvs/ProyectoFinalv
python3 -m ~/venvs/ProyectoFinalvsource ~/venvs/ProyectoFinal/bin/activatepip install -U pippip install -U setuptoolsdeactivate(!) A partir de ahora todos los comandos se ejecutaran en el entorno virtual, por lo que podemos usar pip y python en lugar de pip3 o python3
Referencias:
Los "componentes" se encuentran separados en carpetas y dentro de cada carpeta se encuentra un README con las instrucciones necesarias para instalar las herramientas necesarias y/o hacer modificaciones.
Instalar los paquetes necesarios
sudo aptitude install arduino espeak python3-pyqt4 swi-prolog install pkg-config libpng-dev libfreetype6-dev portaudio19-dev
ln -s /usr/lib/python3/dist-packages/sip.cpython-34m-x86_64-linux-gnu.so ~/venvs/ProyectoFinal/lib/python3.4/site-packages/Instalar las librerias para Python
pip install pyserial speake3 pyswip_alt numpy==1.12.1 scipy==0.19.0 matplotlib==2.0.0 jupyter==1.0.0 pandas==0.20.1 pip install pyaudio==0.2.11 librosa==0.5.1 tensorflow==1.1.0(!) Para una lista detallada consultar el archivo requeriments.txt (resultado del comando pip freeze) por lo que se podría usar el siguiente comando para tener un entornoidéntico: pip install -r requeriments.txt
-
Clonamos el repositorio o descargamos el ZIP
-
Nos dirigimos a la carpeta de Neuralog
cd Neuralog-
Abrimos Arduino IDE y cargamos el sketch Arduino/control_serial.ino
-
Conectamos el Arduino, compilamos y grabamos
Yo utilizo un Arduino Micro conectado de la siguiente forma

Para adaptarlo a otro hay que editar el sketch que se encuentra en Arduino/control_serial.ino y cambiar la placa y los pines a los que se conectan los componentes.
- Nos dirigimos a la carpeta de Neuralog y editamos el archivo Neuralog.py en la parte de CONSTANTES editar la variable PUERTO de acuerdo al puerto en que tenemos conectado el arduino.
Si no sabes cual es el Arduino puedes revisar en el IDE en Tool > Serial Port o ejecutar el siguiente comando
ls /dev | grep ttyACM*- Activamos el entorno
source ~/venvs/ProyectoFinal/bin/activate- Ejecutamos la interfaz
cd Neuralog
python Neuralog.py