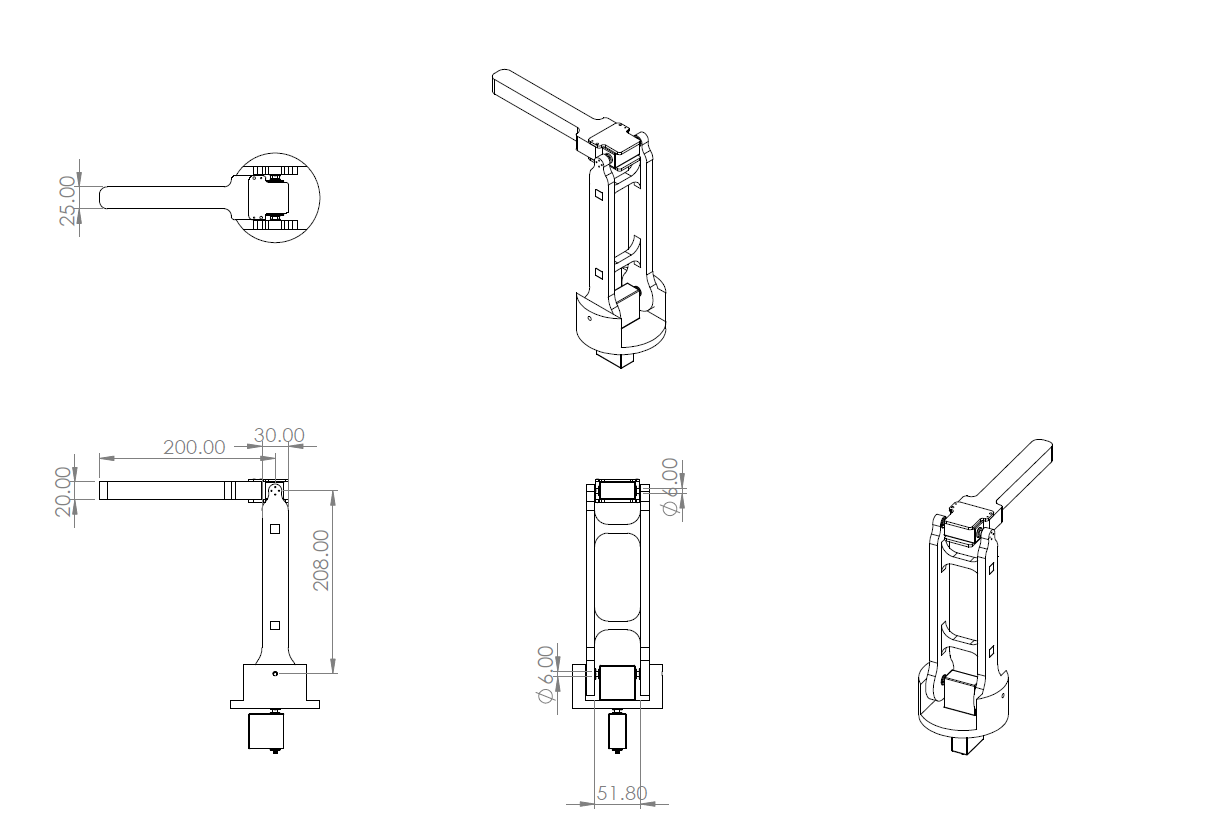
The robot arm consists of 2-Link which indicate its 2-dof it’s RR. We will use Polytetrafluoroethylene (Teflon) which has 2.2
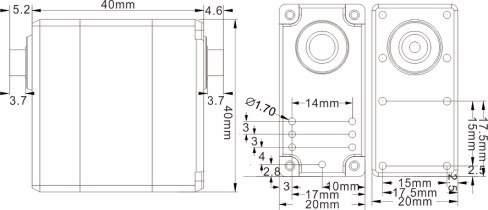
For the motor we will use JX RD-B7640HV-180 40KG this motor Weight around 75g and can produce torque up to 40
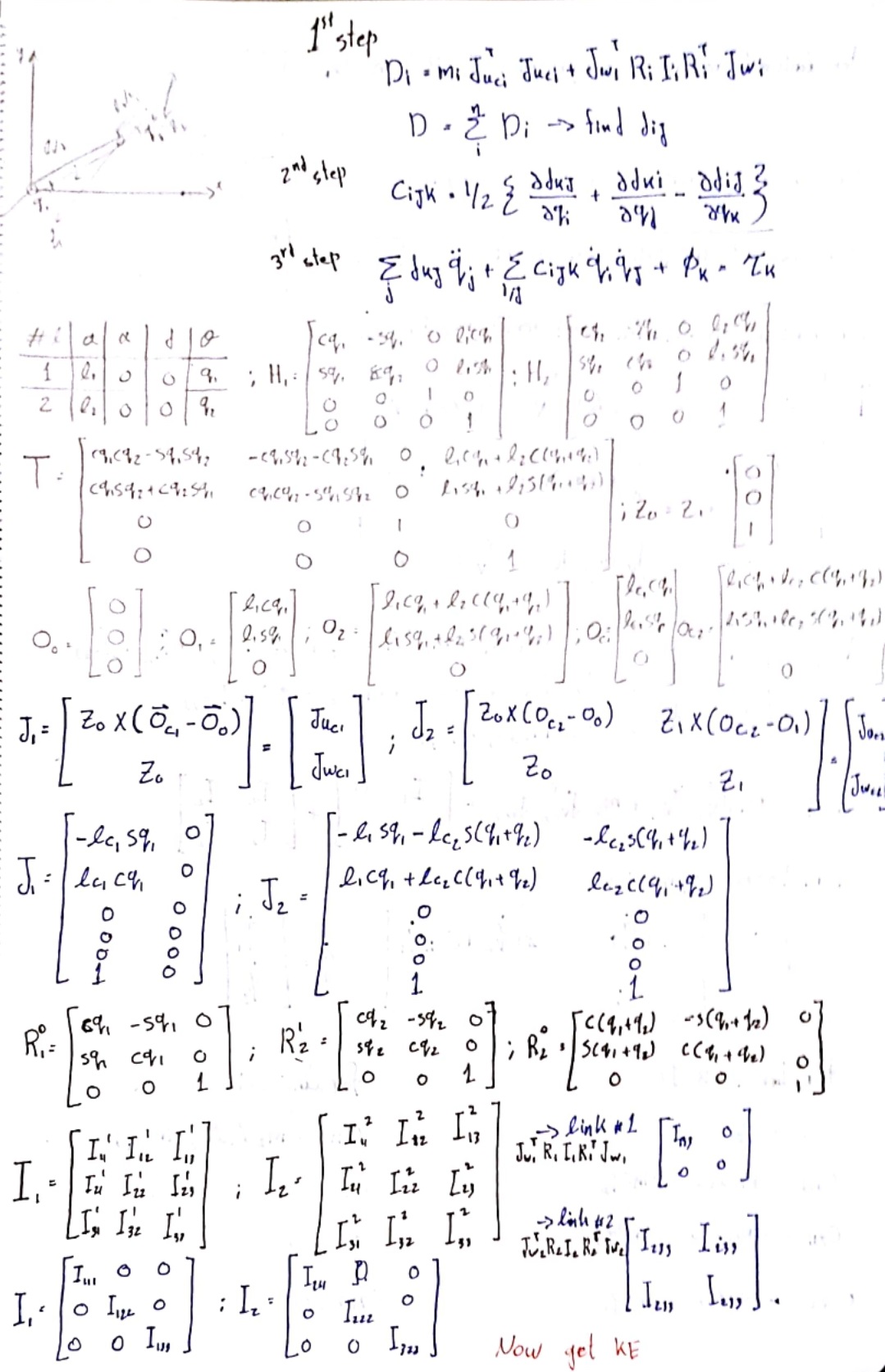
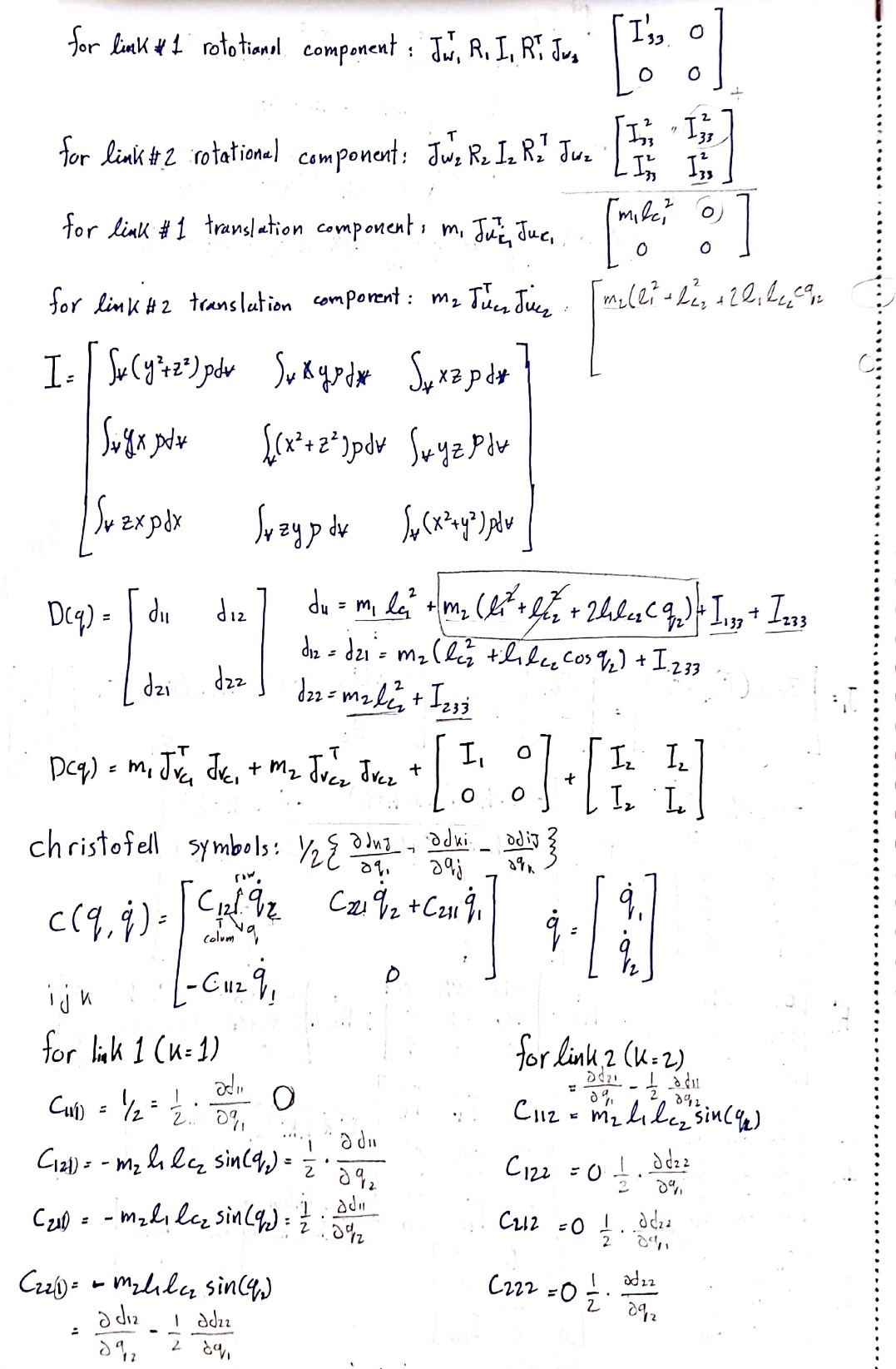
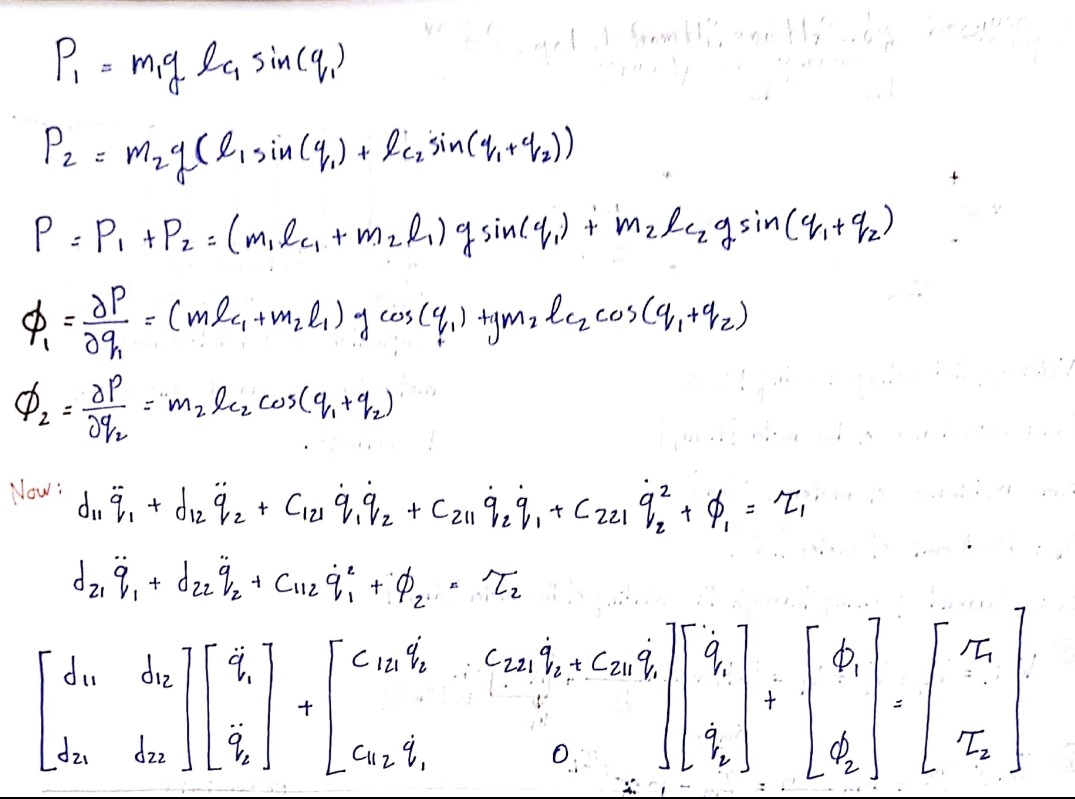
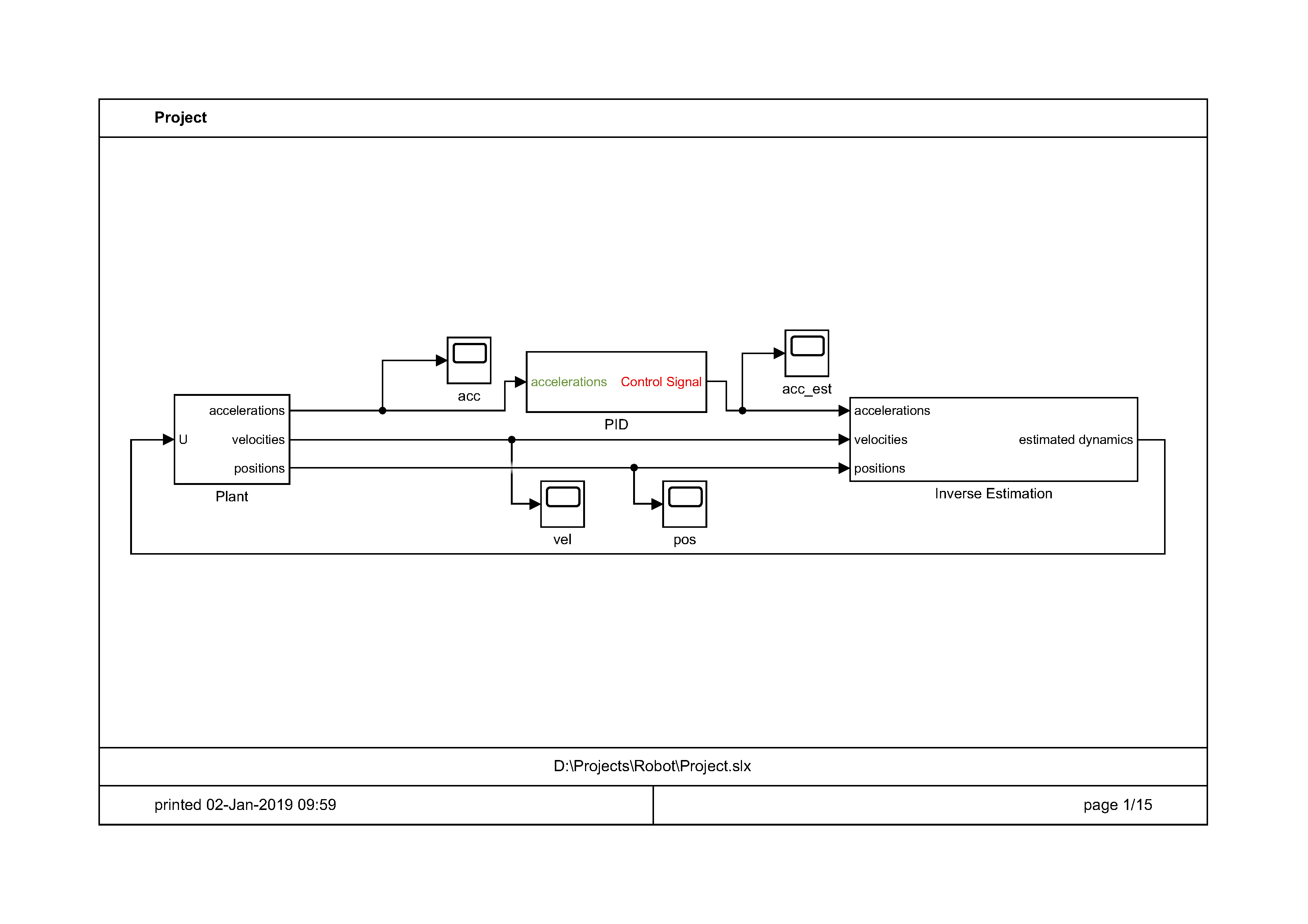
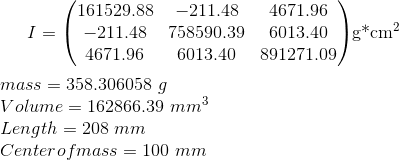
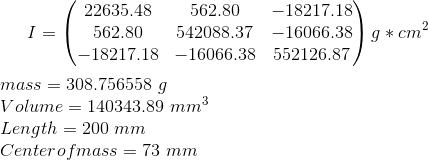
We use these equations for simulation in MATLAB Simulink and we used acceleration control model to control the arm.