This is our final project git repository for EECS 568: Mobile Robotics: Methods and Algorithms. Our project is InEKF Localization and Semantic Mapping on the KITTI Dataset.
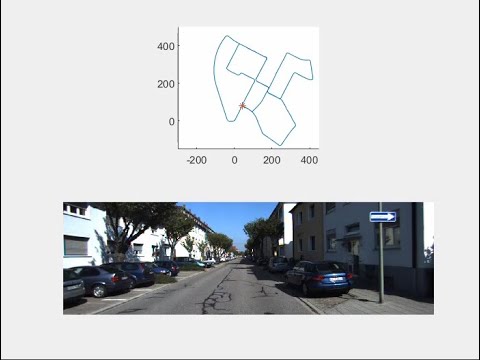
You can see our final presentation video of our program localizing and building a map with KITTI here.
You can find our final report here.
These instructions will get you a copy of the project up and running on your local machine.
Click for full video
- MATLAB
Since our code is written in MATLAB, you can run our program on any OS platform.
First, you need to generate a trajectory with our Left-invariant EKF. To do so, edit line 5 of InEKF_Main.m to feed it the input dataset folder name. For example, for the dataset 0009, the line of code should look like:
filename = '2011_09_26_drive_0079_sync';
After that, simply run InEKF_Main.m and it will save the poses in SE3 as 12 by 1 vectors in a .txt file. The name of the file will be that of the dataset appended by "poses.txt". For instance, the poses generated by the dataset in folder 2011_09_26_drive_0079_sync will be named 2011_09_26_drive_0079_sync_poses.txt.
For test, we are using gtFine_trainvaltest.zip (241MB) [md5] as labels, and using leftImg8bit_trainvaltest.zip (11GB) [md5] as raw input images for training. To further train or test the unet these files should be downloaded from the CityScapes dataset and placed in unet/training/
When validating our training outcome, we are using the images of val subfolder of the corresponding datasets.
To test our code, we are now using deducted train, label and val sets.
- Python 3
- Anaconda
- Cuda, CUDNN
- OpenCV
- CMake
- Eigen
- Octomap: version 1.9.5, devel branch
mkdir build
cd build
cmake ..
make
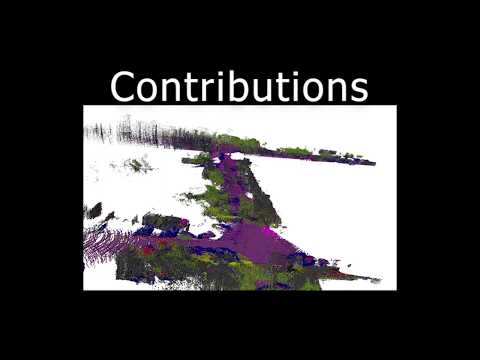
./mapping
*.bin: KITTI LiDAR data.*_pose.txt: ground truth poses of KITTI odometry sequence.calib_cam_to_cam.txt,calib_imu_to_velo.txt, andcalib_velo_to_cam.txt: calibration transformation matrix*mapping.ot: test LiDAR mapping.
*.ot files are for visualization with Octovis.
- KITTI Vision Benchmark Suite
- CityScapes Semantic Understanding of Urban Street Scenes
We used the Octomap library, and their licenses are:
- octomap: New BSD License
- octovis and related libraries: GPL
- Mu-Ti Chung - [email protected]
- James Cooney - [email protected]
- Tony Pan - [email protected]
- Shoutian Wang - [email protected]
- Haoxiang Wu - [email protected]
Thank you to our instructor Maani Ghaffari for making this possible.