Bullet Physics SDK 2.88 and PyBullet
A lot of work this year went into improving PyBullet for robotics and reinforcement learning research.
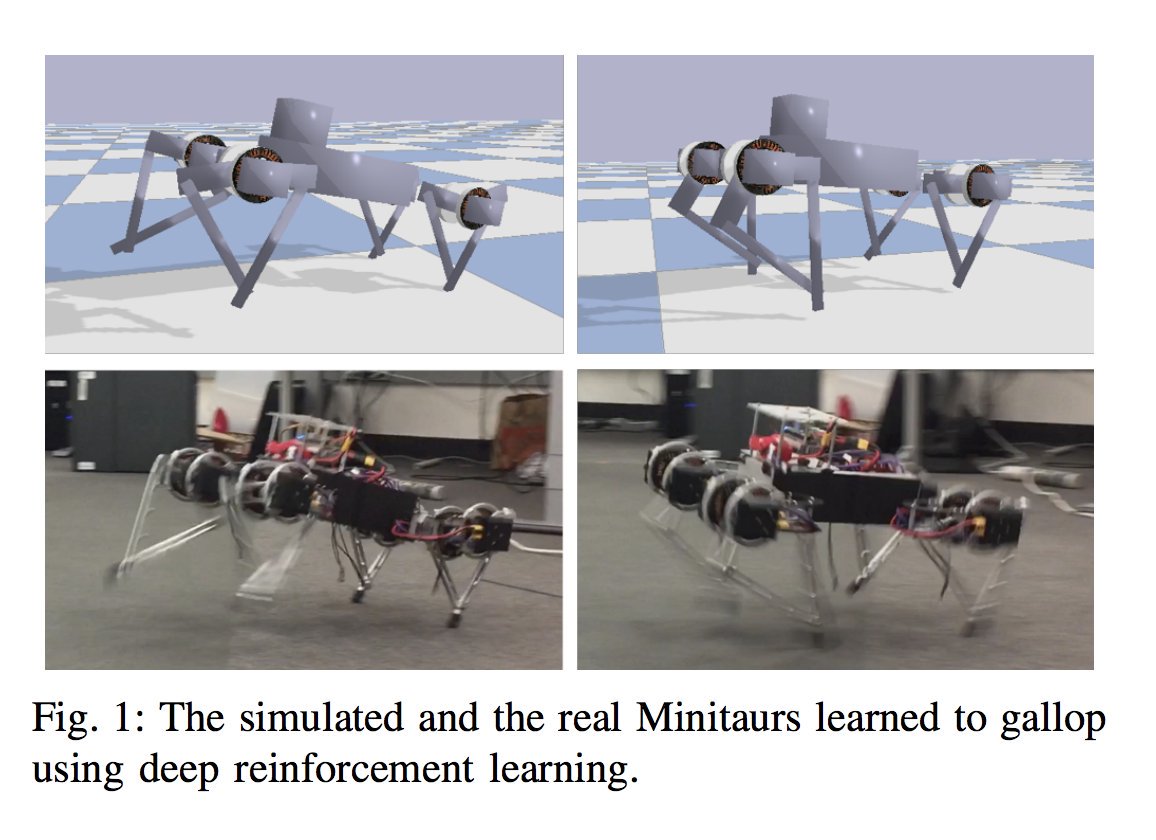
The SDK was used in several published research papers by Google Brain Robotics, including our RSS 2018 paper "Sim-to-Real: Learning Agile Locomotion For Quadruped Robots" , see the video here
Some of the improvements are related to maintaining determinism when saving and restoring a simulation, and improving the accuracy of GJK convex collision detection and btMultiBody.