-
Notifications
You must be signed in to change notification settings - Fork 97
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Merge remote-tracking branch 'sktometometo/PR/add-complex-recovery' i…
…nto develop/fetch
- Loading branch information
Showing
16 changed files
with
794 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,89 @@ | ||
| cmake_minimum_required(VERSION 2.8.3) | ||
| project(complex_recovery) | ||
|
|
||
| add_compile_options(-std=c++11) | ||
|
|
||
| find_package(catkin REQUIRED | ||
| COMPONENTS | ||
| costmap_2d | ||
| nav_core | ||
| pluginlib | ||
| roscpp | ||
| tf2 | ||
| tf2_ros | ||
| ) | ||
|
|
||
| catkin_package( | ||
| INCLUDE_DIRS include | ||
| LIBRARIES complex_recovery | ||
| CATKIN_DEPENDS | ||
| costmap_2d | ||
| nav_core | ||
| pluginlib | ||
| roscpp | ||
| tf2 | ||
| tf2_ros | ||
| ) | ||
|
|
||
| # Abort if indigo or kinetic | ||
| if ( $ENV{ROS_DISTRO} STREQUAL "indigo" OR $ENV{ROS_DISTRO} STREQUAL "kinetic" ) | ||
| return() | ||
| endif() | ||
|
|
||
| include_directories( | ||
| include | ||
| ${catkin_INCLUDE_DIRS} | ||
| ) | ||
|
|
||
| add_library(complex_recovery | ||
| src/sequential_complex_recovery.cpp | ||
| src/parallel_complex_recovery.cpp | ||
| src/utils.cpp | ||
| ) | ||
| add_dependencies(complex_recovery | ||
| ${${PROJECT_NAME}_EXPORTED_TARGETS} | ||
| ${catkin_EXPORTED_TARGETS} | ||
| ) | ||
| target_link_libraries(complex_recovery | ||
| ${catkin_LIBRARIES} | ||
| ) | ||
|
|
||
| install(TARGETS complex_recovery | ||
| ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} | ||
| LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} | ||
| RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION} | ||
| ) | ||
|
|
||
| install(DIRECTORY include/${PROJECT_NAME}/ | ||
| DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION} | ||
| FILES_MATCHING PATTERN "*.h" | ||
| ) | ||
|
|
||
| install(FILES complex_recovery_plugins.xml | ||
| DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION} | ||
| ) | ||
|
|
||
| # | ||
| # Testing | ||
| # | ||
| if (CATKIN_ENABLE_TESTING) | ||
| find_package(rostest REQUIRED) | ||
|
|
||
| catkin_add_executable_with_gtest(sequential_complex_recovery_test_node | ||
| tests/sequential_complex_recovery_test_node.cpp | ||
| ) | ||
| target_link_libraries(sequential_complex_recovery_test_node | ||
| ${catkin_LIBRARIES} | ||
| ${PROJECT_NAME} | ||
| ) | ||
| add_rostest(tests/sequential_complex_recovery.test) | ||
|
|
||
| catkin_add_executable_with_gtest(parallel_complex_recovery_test_node | ||
| tests/parallel_complex_recovery_test_node.cpp | ||
| ) | ||
| target_link_libraries(parallel_complex_recovery_test_node | ||
| ${catkin_LIBRARIES} | ||
| ${PROJECT_NAME} | ||
| ) | ||
| add_rostest(tests/parallel_complex_recovery.test) | ||
| endif() |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,67 @@ | ||
| # complex_recovery | ||
|
|
||
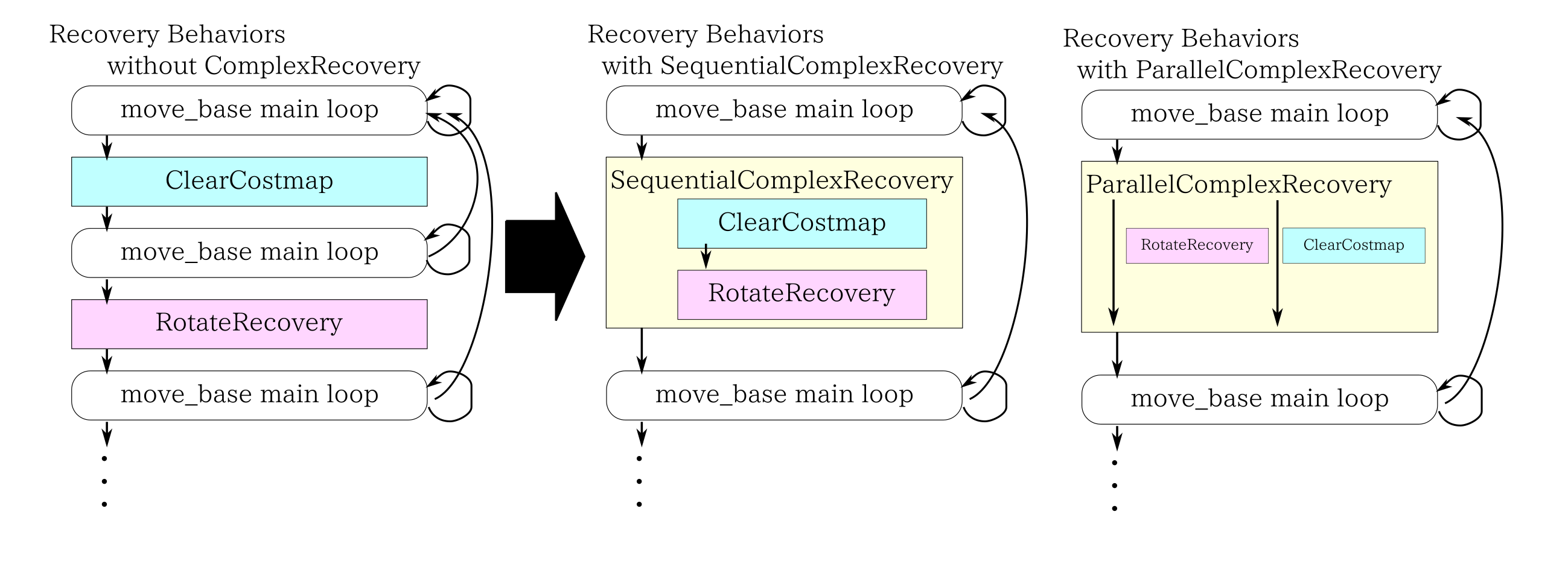
| This package provides recovery behavior plugins which combines multi recoveries to one recovery behavior. | ||
| This is useful for assuring a set of recovery behavior to run at one time. | ||
|
|
||
| There are two types of recoveries. One is to run multi recoveries sequentially and another is to run them in parallel. | ||
|
|
||
|  | ||
|
|
||
| ## complex_recovery/SequentialComplexRecovery | ||
|
|
||
| * `~recovery_behaviors` (list of dictionaries which has `name` and `type` entries, default: None) | ||
|
|
||
| Example configuration of `move_base` is like | ||
|
|
||
| ```yaml | ||
| recovery_behavior_enabled: true | ||
| recovery_behaviors: | ||
| - name: "speak_then_clear_costmap0" | ||
| type: "complex_recovery/SequentialComplexRecovery" | ||
| speak_then_clear_costmap0: | ||
| recovery_behaviors: | ||
| - name: "speak_and_wait0" | ||
| type: "speak_and_wait_recovery/SpeakAndWaitRecovery" | ||
| - name: "clear_costmap0" | ||
| type: "clear_costmap_recovery/ClearCostmapRecovery" | ||
| speak_and_wait0: | ||
| speak_text: "I'm clearing costmap." | ||
| duration_wait: 5.0 | ||
| duration_timeout: 1.0 | ||
| sound_action: /sound_play | ||
| clear_costmap0: | ||
| reset_distance: 1.0 | ||
| ``` | ||
| In this case, `speak_and_clear_costmap0` recovery runs `speak_and_wait0` recovery first, then runs `clear_costmap0`. | ||
| So a robot speaks first and then clear its costmap. | ||
|
|
||
| ## complex_recovery/ParallelComplexRecovery | ||
|
|
||
| * `~recovery_behaviors` (list of dictionaries which has `name` and `type` entries, default: None) | ||
|
|
||
| Example configuration of `move_base` is like | ||
|
|
||
| ```yaml | ||
| recovery_behavior_enabled: true | ||
| recovery_behaviors: | ||
| - name: "speak_and_rotate_costmap0" | ||
| type: "complex_recovery/SequentialComplexRecovery" | ||
| speak_and_rotate_costmap0: | ||
| recovery_behaviors: | ||
| - name: "speak_and_wait0" | ||
| type: "speak_and_wait_recovery/SpeakAndWaitRecovery" | ||
| - name: "rotate0" | ||
| type: "rotate_recovery/RotateRecovery" | ||
| speak_and_wait0: | ||
| speak_text: "I'm rotating." | ||
| duration_wait: 5.0 | ||
| duration_timeout: 1.0 | ||
| sound_action: /sound_play | ||
| rotate0: | ||
| sim_granularity: 0.017 | ||
| frequency: 20.0 | ||
| ``` | ||
|
|
||
| In this case, `speak_and_rotate_costmap0` recovery runs `speak_and_wait0` and `rotate0` simultaneously. | ||
| So a robot speaks during its rotation. |
18 changes: 18 additions & 0 deletions
18
jsk_robot_common/complex_recovery/complex_recovery_plugins.xml
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,18 @@ | ||
| <library path="lib/libcomplex_recovery"> | ||
| <class | ||
| name="complex_recovery/SequentialComplexRecovery" | ||
| type="complex_recovery::SequentialComplexRecovery" | ||
| base_class_type="nav_core::RecoveryBehavior"> | ||
| <description> | ||
| A recovery behavior that runs other recovery behaviors sequentially. | ||
| </description> | ||
| </class> | ||
| <class | ||
| name="complex_recovery/ParallelComplexRecovery" | ||
| type="complex_recovery::ParallelComplexRecovery" | ||
| base_class_type="nav_core::RecoveryBehavior"> | ||
| <description> | ||
| A recovery behavior that runs other recovery behaviors in parallel. | ||
| </description> | ||
| </class> | ||
| </library> |
32 changes: 32 additions & 0 deletions
32
jsk_robot_common/complex_recovery/include/complex_recovery/parallel_complex_recovery.h
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,32 @@ | ||
| #ifndef COMPLEX_RECOVERY_H | ||
| #define COMPLEX_RECOVERY_H | ||
|
|
||
| #include <nav_core/recovery_behavior.h> | ||
| #include <costmap_2d/costmap_2d_ros.h> | ||
| #include <tf2_ros/buffer.h> | ||
| #include <actionlib/client/simple_action_client.h> | ||
|
|
||
| namespace complex_recovery | ||
| { | ||
|
|
||
| class ParallelComplexRecovery : public nav_core::RecoveryBehavior | ||
| { | ||
| public: | ||
| ParallelComplexRecovery(); | ||
| void initialize( | ||
| std::string name, | ||
| tf2_ros::Buffer* tf_buffer, | ||
| costmap_2d::Costmap2DROS* global_costmap, | ||
| costmap_2d::Costmap2DROS* local_costmap); | ||
| void runBehavior(); | ||
| ~ParallelComplexRecovery(); | ||
|
|
||
| private: | ||
| bool initialized_; | ||
| std::vector<boost::shared_ptr<nav_core::RecoveryBehavior> > recovery_behaviors_; | ||
| std::vector<std::string> recovery_behavior_names_; | ||
| pluginlib::ClassLoader<nav_core::RecoveryBehavior> recovery_loader_; | ||
| }; | ||
| }; | ||
|
|
||
| #endif |
32 changes: 32 additions & 0 deletions
32
jsk_robot_common/complex_recovery/include/complex_recovery/sequential_complex_recovery.h
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,32 @@ | ||
| #ifndef COMPLEX_RECOVERY_H | ||
| #define COMPLEX_RECOVERY_H | ||
|
|
||
| #include <nav_core/recovery_behavior.h> | ||
| #include <costmap_2d/costmap_2d_ros.h> | ||
| #include <tf2_ros/buffer.h> | ||
| #include <pluginlib/class_loader.hpp> | ||
|
|
||
| namespace complex_recovery | ||
| { | ||
|
|
||
| class SequentialComplexRecovery : public nav_core::RecoveryBehavior | ||
| { | ||
| public: | ||
| SequentialComplexRecovery(); | ||
| void initialize( | ||
| std::string name, | ||
| tf2_ros::Buffer*, | ||
| costmap_2d::Costmap2DROS* global_costmap, | ||
| costmap_2d::Costmap2DROS* local_costmap); | ||
| void runBehavior(); | ||
| ~SequentialComplexRecovery(); | ||
|
|
||
| private: | ||
| bool initialized_; | ||
| std::vector<boost::shared_ptr<nav_core::RecoveryBehavior> > recovery_behaviors_; | ||
| std::vector<std::string> recovery_behavior_names_; | ||
| pluginlib::ClassLoader<nav_core::RecoveryBehavior> recovery_loader_; | ||
| }; | ||
| }; | ||
|
|
||
| #endif |
21 changes: 21 additions & 0 deletions
21
jsk_robot_common/complex_recovery/include/complex_recovery/utils.h
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,21 @@ | ||
| #include <pluginlib/class_list_macros.h> | ||
| #include <nav_core/recovery_behavior.h> | ||
| #include <costmap_2d/costmap_2d_ros.h> | ||
| #include <tf2_ros/buffer.h> | ||
| #include <pluginlib/class_loader.hpp> | ||
|
|
||
| namespace complex_recovery | ||
| { | ||
|
|
||
|
|
||
| bool loadRecoveryBehaviors( | ||
| std::string parent_name, | ||
| ros::NodeHandle& node, | ||
| pluginlib::ClassLoader<nav_core::RecoveryBehavior>& recovery_loader, | ||
| std::vector<boost::shared_ptr<nav_core::RecoveryBehavior> >& recovery_behaviors, | ||
| std::vector<std::string>& recovery_behavior_names, | ||
| tf2_ros::Buffer* ptr_tf_buffer, | ||
| costmap_2d::Costmap2DROS* ptr_global_costmap, | ||
| costmap_2d::Costmap2DROS* ptr_local_costmap | ||
| ); | ||
| }; |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,30 @@ | ||
| <?xml version="1.0"?> | ||
| <package format="2"> | ||
| <name>complex_recovery</name> | ||
| <version>1.1.0</version> | ||
| <description>The complex_recovery package</description> | ||
|
|
||
| <author email="[email protected]">Koki Shinjo</author> | ||
| <maintainer email="[email protected]">Kei Okada</maintainer> | ||
| <maintainer email="[email protected]">Koki Shinjo</maintainer> | ||
|
|
||
| <license>BSD</license> | ||
|
|
||
|
|
||
| <buildtool_depend>catkin</buildtool_depend> | ||
|
|
||
| <depend>costmap_2d</depend> | ||
| <depend>nav_core</depend> | ||
| <depend>pluginlib</depend> | ||
| <depend>roscpp</depend> | ||
| <depend>tf2</depend> | ||
| <depend>tf2_ros</depend> | ||
|
|
||
| <test_depend>rostest</test_depend> | ||
| <test_depend>speak_and_wait_recovery</test_depend> | ||
| <test_depend>sound_play</test_depend> | ||
|
|
||
| <export> | ||
| <nav_core plugin="${prefix}/complex_recovery_plugins.xml" /> | ||
| </export> | ||
| </package> |
84 changes: 84 additions & 0 deletions
84
jsk_robot_common/complex_recovery/src/parallel_complex_recovery.cpp
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,84 @@ | ||
| #include <complex_recovery/parallel_complex_recovery.h> | ||
| #include <complex_recovery/utils.h> | ||
| #include <pluginlib/class_list_macros.h> | ||
| #include <thread> | ||
|
|
||
| PLUGINLIB_EXPORT_CLASS(complex_recovery::ParallelComplexRecovery, nav_core::RecoveryBehavior) | ||
|
|
||
| namespace complex_recovery | ||
| { | ||
|
|
||
| ParallelComplexRecovery::ParallelComplexRecovery(): | ||
| initialized_(false), | ||
| recovery_loader_("nav_core", "nav_core::RecoveryBehavior") | ||
| { | ||
| } | ||
|
|
||
| void ParallelComplexRecovery::initialize( | ||
| std::string name, | ||
| tf2_ros::Buffer* tf_buffer, | ||
| costmap_2d::Costmap2DROS* global_costmap, | ||
| costmap_2d::Costmap2DROS* local_costmap) | ||
| { | ||
| if (not initialized_) { | ||
| ros::NodeHandle private_nh("~/" + name); | ||
| bool success = loadRecoveryBehaviors( | ||
| name, | ||
| private_nh, | ||
| recovery_loader_, | ||
| recovery_behaviors_, | ||
| recovery_behavior_names_, | ||
| tf_buffer, | ||
| global_costmap, | ||
| local_costmap | ||
| ); | ||
| if ( not success ) { | ||
| ROS_ERROR("Failed to load behaviors."); | ||
| } else { | ||
| ROS_INFO("Behaviors are loaded."); | ||
| for (auto behavior_name = recovery_behavior_names_.begin(); behavior_name != recovery_behavior_names_.end(); behavior_name++) { | ||
| ROS_INFO("behavior: %s", behavior_name->c_str()); | ||
| } | ||
| } | ||
|
|
||
| initialized_ = true; | ||
| } else { | ||
| ROS_ERROR("You should not call initialize twice on this object, doing nothing"); | ||
| } | ||
| } | ||
|
|
||
| ParallelComplexRecovery::~ParallelComplexRecovery() | ||
| { | ||
| recovery_behaviors_.clear(); | ||
| } | ||
|
|
||
| void ParallelComplexRecovery::runBehavior() | ||
| { | ||
| if (not initialized_) | ||
| { | ||
| ROS_ERROR("This object must be initialized before runBehavior is called"); | ||
| return; | ||
| } | ||
|
|
||
| std::vector<std::shared_ptr<std::thread>> threads; | ||
|
|
||
| ROS_INFO("Start executing behaviors in parallel."); | ||
| for (auto index = 0; index < recovery_behaviors_.size(); index++) { | ||
| ROS_INFO("start executing behavior %s", recovery_behavior_names_[index].c_str()); | ||
| threads.push_back( | ||
| std::shared_ptr<std::thread>( | ||
| new std::thread( | ||
| &nav_core::RecoveryBehavior::runBehavior, | ||
| recovery_behaviors_[index] | ||
| ))); | ||
| } | ||
|
|
||
| ROS_INFO("Waiting for behaviors to finish."); | ||
| for (auto thread = threads.begin(); thread != threads.end(); thread++) { | ||
| (*thread)->join(); | ||
| } | ||
|
|
||
| ROS_INFO("All behaviors have finished."); | ||
| } | ||
|
|
||
| }; |
Oops, something went wrong.