vrx_2022 perception_task
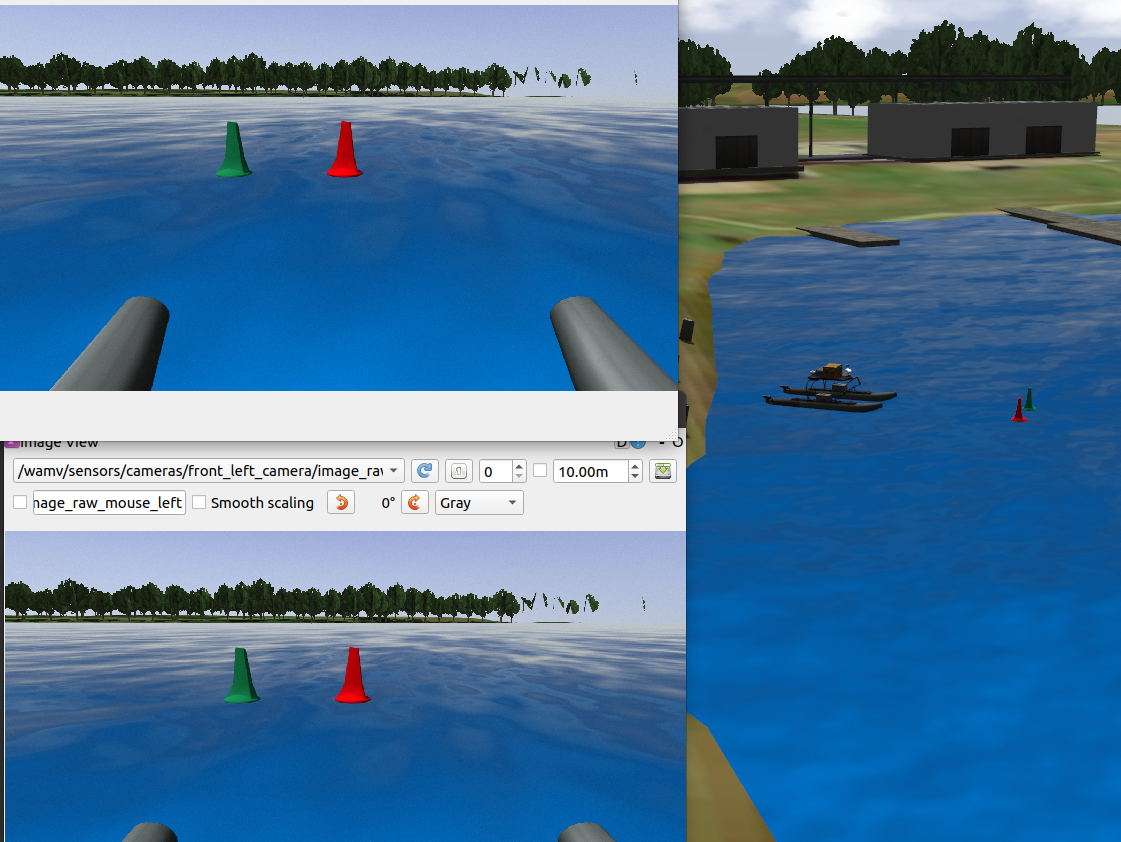
In this task, the vehicle remains in a fixed location and markers will appear in the field of view (see this video for a demonstration of the expected behavior). The objective is to use perceptive sensors to identify the markers and report their locations.
roslaunch vrx_gazebo perception_task.launch
- View the camera feeds from the front of the WAM-V:
rosrun rqt_image_view rqt_image_view image:=/wamv/sensors/cameras/middle_right_camera/image_raw
- For the timeout counter and your current score, subscribe to the
/vrx/task/infotopic:
rostopic echo /vrx/task/info
-
Trials will begin. Identify the type and location of the markers that appear during each trial.
-
Publish landmark identification and localization solutions as a geographic_msgs/GeoPoseStamped message to the
/vrx/perception/landmarktopic. (Example:rostopic pub -1 /vrx/perception/landmark geographic_msgs/GeoPoseStamped '{header: {stamp: now, frame_id: "red_mark"}, pose: {position: {latitude: -33.7227024, longitude: 150.67402097, altitude: 0.0}}}'
- Each trial will last for 5 seconds
- Solutions must be submitted before the end of the trial
- Only the first submission for each trial will be considered